英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
双主动桥DC-DC的虚拟直接功率控制方案快速动态响应的转换器
王文生,IEEE会员,聂厚,吴明义
摘要
高性能双有源桥(DAB)dc-dc转换器作为受控直流电压源的基本要求之一是在所有工作条件下快速准确地获得恒定的输出电压。为了达到快速动态响应,将直接功率控制与前馈控制策略结合起来,本文提出了一种虚拟直接功率控制(VDPC)方案
DAB DC-DC转换器的单相移(SPS)控制,以面对以下极端条件,例如:启动,负载阶跃变化,空载,输入电压波动和期望的输出电压阶跃变化。提出的VDPC方案
的DAB dc-dc转换器在负载或输入电压扰动和启动阶段不会达到输出电压的过冲和快速瞬态响应。当期望值上升和下降时,输出电压控制的动态响应也得到改善。最后,由传统的电压环路控制(TVL),负载电流前馈(LCFF)控制,基于模型的相移(MPS)控制和提出的VDPC方案组成的四个控制方案按比例缩小DAB dc-dc转换器实验原型。实验结果验证了上述提出的VDPC方案的优异性能和理论分析的有效性。
索引术语 - 虚拟直接功率控制,双有源桥dc-dc转换器,相移控制,快速动态响应
1.引言
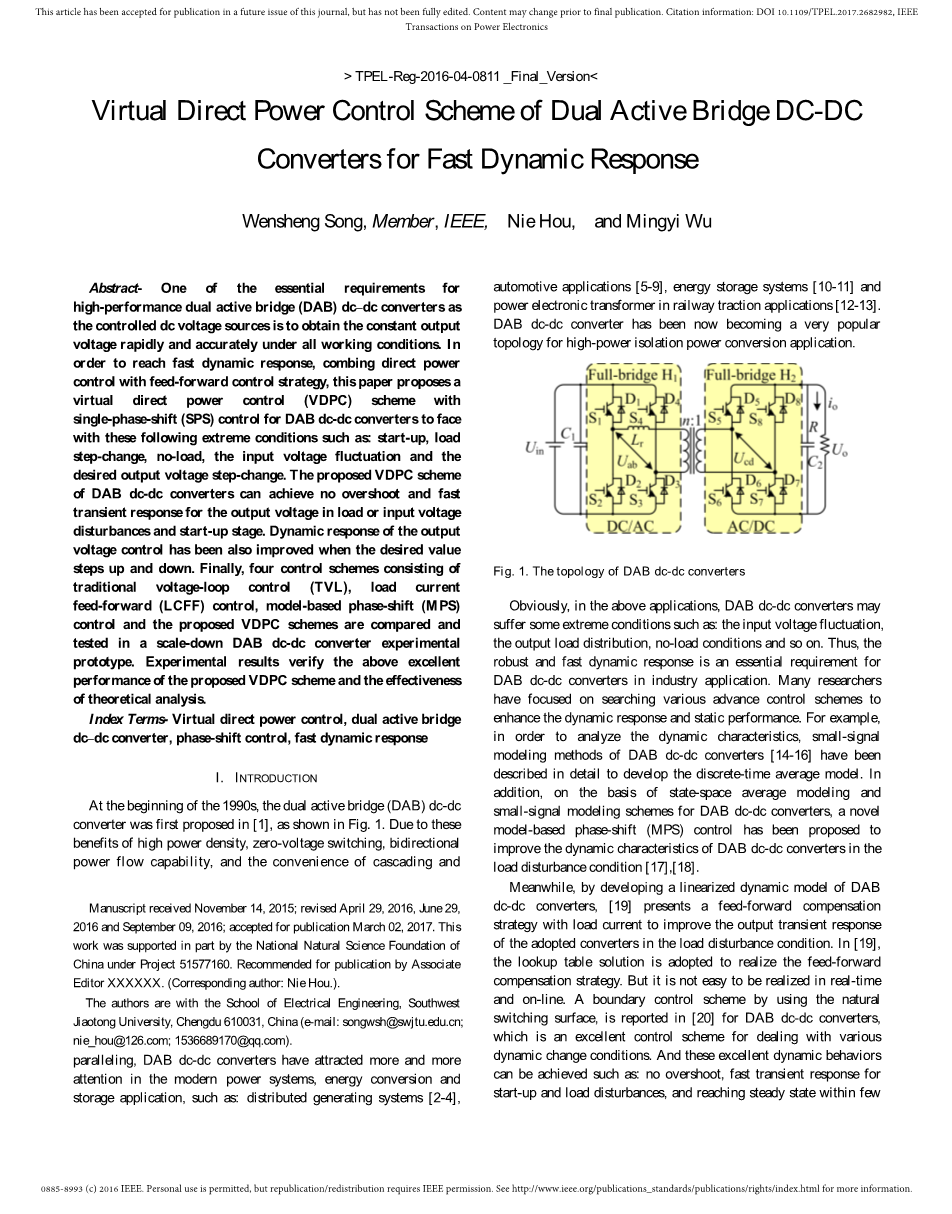
在20世纪90年代初,双有源桥(DAB)dc-dc转换器在[1]中首次提出,如图1所示。 由于高功率密度,零电压开关,双向功率流能力以及2015年11月14日收到的级联方便等优点; 修订2016年4月29日,2016年6月29日和2016年9月9日; 接受发表2017年3月02日。这项工作部分由中国国家自然科学基金项目51577160支持。推荐由副主编XXXXXX出版。 (通讯作者:Nie Hou。)。 作者是与西南交通大学电气工程学院,成都610031(电子邮件:songwsh@swjtu.edu.cn; nie_hou@126.com; 1536689170@qq.com)。
并联的DAB dc-dc转换器在现代电力系统,能量转换和存储应用中已经引起越来越多的关注,例如:分布式发电系统[2-4]汽车应用[5-9],储能系统[10-11]和电力电子变压器在铁路牵引应用[12-13]。 DAB DC-DC转换器现在已成为用于大功率隔离功率转换应用的非常流行的拓扑。
图1.DAB直流-直流变换器拓扑结构
显然,在上述应用中,DAB dc-dc转换器可能遭受一些极端条件,如:输入电压波动,
输出负载分布,空载条件等。就这样稳健和快速的动态响应是必不可少的要求DAB DC-DC转换器。许多研究人员重点研究各种先进控制方案增强动态响应和静态性能。例如,以便分析动态特性,小信号DAB dc-dc转换器的建模方法[14-16]详细描述了开发离散时间平均模型。在另外,在状态空间平均模型的基础上小信号模拟方案为DAB dc-dc转换器,一种小说基于模型的相移(MPS)控制已被提出提高DAB DC-DC转换器的动态特性负载扰动条件[17],[18]。同时,通过开发DAB的线性化动态模型dc-dc转换器[19]提出了前馈补偿策略与负载电流提高输出瞬态响应的负载干扰条件下采用的转换器。在[19]中,采用查找表解决方案实现前馈补偿策略。但是它不容易实时实现和在线。边界控制方案使用自然开关表面,在[20]中报道的DAB dc-dc转换器,这是一个很好的控制方案来处理各种动态变化条件。和这些优秀的动态行为可以实现如:无过冲,快速瞬态响应启动和负载扰动,并在几个切换动作内达到稳态。
切换动作。然而,所提出的方法属于可变频率控制方案和变压器饱和会发生。变压器饱和是这种控制中的一个关键问题方案。但在恒定频率控制方案中,如果参数并设计了高频变压器的结构适当地,可以容易地避免变压器饱和[21-22]。此外,负载电流前馈控制是一种替代方案解决方案[23-24]来改善负载变化的动态性能。为了实现DAB dc-dc的稳健动态响应转换器,直接功率控制可以是一种有效的方法,其已被广泛应用和报告为前排整流器[25-26]和可再生能源网侧逆变器系统[27-28]。如何快速达到所需输出功率是大多数转换器的动态控制的基本要求。从而,直接功率控制将是一个更好的选择,与负载相比前馈控制。鉴于上述研究,着眼于直接功率控制,本文提出了一种简单的虚拟直接功率控制(VDPC)方案,其易于实现为恒定频率控制DAB DC-DC转换器以改善动态响应。基于传统的单相移(SPS)控制,VDPC方案详细分析。在执行过程中提出了VDPC方案,三个数量组成的输出电压,输入电压和负载电流应进行测量和采样。幸运的是,一些电路参数如电感值,变压器转换比和开关周期不必要。然后,对传统的实验比较电压环(TVL)控制,负载电流前馈(LCFF)控制源自现有的电流前馈控制[23-24],MPS控制[17-18]和提出的VDPC方案对于DAB dc-dc转换器,显示了突出的特点和提出的VDPC方案的优越性能。在另外,提出的VPDC方案在空载运行条件在实验平台上进行测试。本文按以下方式组织。在第一节,介绍。在第二部分,SPS控制和MPS控制进行详细分析。在传统SPS的基础上控制,VDPC方案在第三部分中提出和讨论。四个控制方案的实验比较结果是展示和讨论,以验证理论的有效性分析,然后在第六节中得出结论。
2. SPS控制和MPS控制的开关模式分析
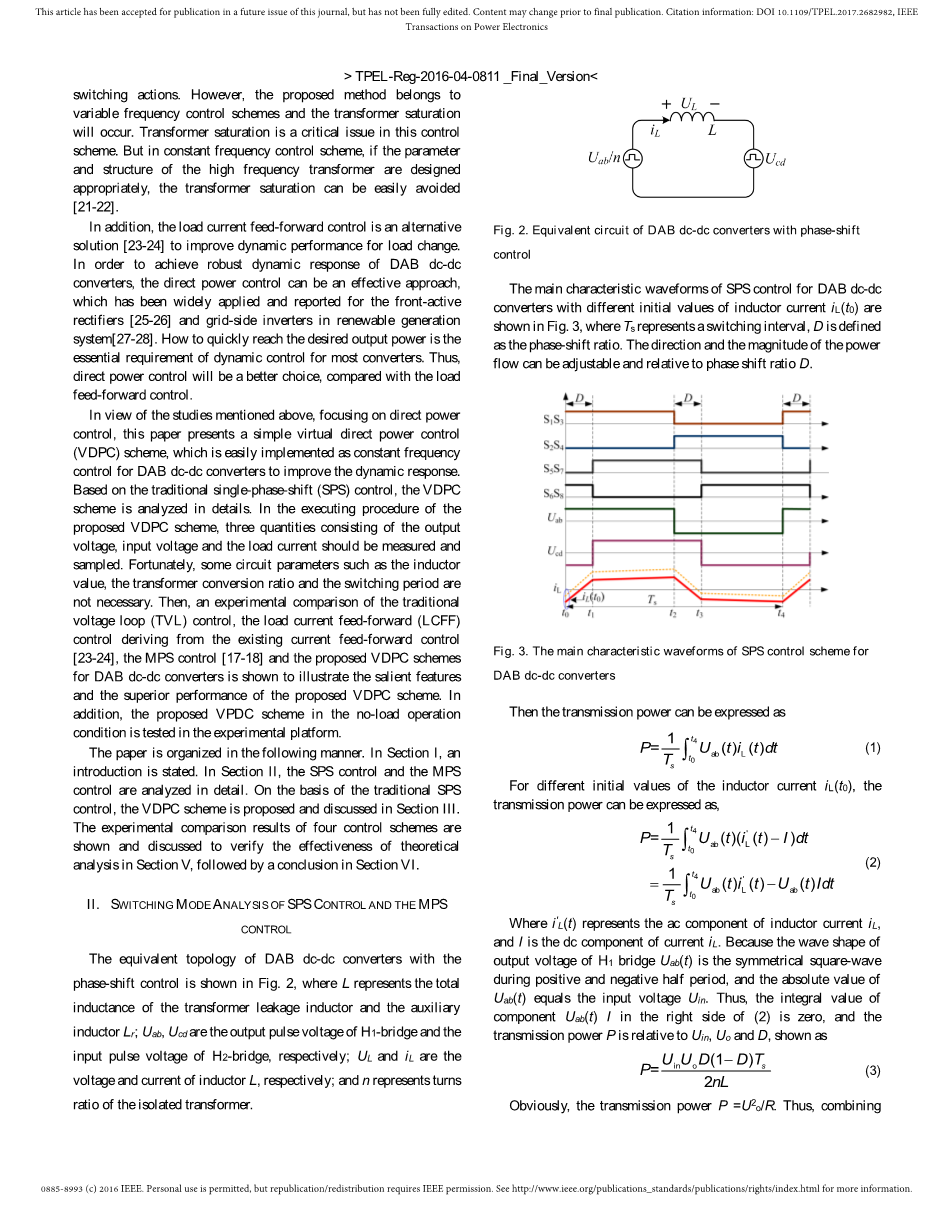
具有相移控制的DAB dc-dc转换器的等效拓扑如图1所示。 2,其中L表示变压器漏感和辅助电感Lr的总电感; Uab,Ucd分别为H1桥的输出脉冲电压和H2桥的输入脉冲电压; UL和iL都是电感器L的电压和电流; n表示隔离变压器的匝数比。
图2.带有相移控制的DAB直流-直流变换器等效电路
具有不同电感电流iL(t0)初始值的DAB dc-dc转换器SPS控制的主要特征波形如图1所示。 其中Ts表示切换间隔,D被定义为相移比。 功率流的方向和大小可以是可调的并且相对于相移比D。
图3.DAB直流-直流转换器的SPS控制方案的主要特征波形
那么发射功率可以表示为
对于电感器电流iL(t0)的不同初始值,发射功率可以表示为,
其中iL(t)表示电感电流iL的交流分量,I是电流iL的直流分量。 因为H1桥Uab(t)的输出电压的波形是对称的正方形正负半周期,Uab(t)的绝对值等于输入电压Uin。 因此,的积分值(2)右侧的分量Uab(t)I为零,发射功率P相对于Uin,Uo和D,如下
显然,发射功率P = U2o / R。 因此,结合(3),输出电压Uo可以表示为
期望的相移比D *从(4)导出并表示为,
其中负载电阻R应在线估计,并从(5)推导为
此外,在实际的功率转换器系统中,由于大的支持电容器C2,输出电压不随着改变的电阻值立即变化。 因此,该延迟将影响负载电阻估计的动态性能,特别是在负载阶跃变化条件下。 在MPS控制[17-18]中,显然可以通过组合(5)和(6)消除这些参数,如电感L,变压器匝数比n和开关周期Ts。 因此,虚拟负载电阻Rv可以被定义和表示为
将(7)的电阻R代入(5)得到
从(8)可以看出,期望的相移比D *与电感器L,变压器匝数比n和开关周期Ts无关。 具有输入电压前馈的MPS控制方案的控制框图如图17所示。 采用比例积分(PI)控制器来改善输出电压控制的动态响应。 并且PI控制器△D的输出被加到所需的相移比D *作为相移比D,表示为,
图4.DAB直流-直流转换器的带有输入电压正反馈的MPS框图
根据MPS控制,负载电阻可以表示为R = Uo / io。 并且将其代入(5),通过收集负载电流io,相移比D *可以表示为(10)
此外,具有负载电流和输入电压前馈的MPS控制方案的控制块如图5所示
图5.DAB直流-直流转换器的带有输出电流和输入电压正反馈的MPS框图
根据采样输入电压Uin,输出电压Uo和负载电流io以及电感值L,开关周期Ts和变压器匝数比n,可以从(10)估计相移比D *,以改善动态 性能的DAB DC-DC转换器。 然而,为了获得高精度相移比D *,这些参数应该非常准确。否则,动态性能将恶化。
3建议的虚拟直接电源控制方案
为了改善DAB dc-dc转换器的动态响应,直接功率控制是一个有效的解决方案。根据直接功率控制的原理,如果可以立即达到所需的输出功率,可以实现优异的动态性能。因此,为了满足期望的输出功率需要说明输入发送功率和输出功率之间的关系。
在实际的转换器应用中,DAB dc-dc转换器的功率损耗不能被忽略,并且在输入功率和输出功率之间存在差异。因此,所需的发射功率P *不能简单地表示为期望输出电压Uo *和电流io *的算术乘积。因此,采用虚拟功率控制来补偿由功率开关的功率损耗和电压降引起的功率差。由于
DAB DC-DC转换器的双向电力潮流操作模式,统一发送功率参考p *可以表示如下,
其中Uv *被命名为虚拟期望输出电压,其是PI控制器的输出值。 并且期望的输出电流io *可以描述如下,
将(12)代入(11)中得到
控制目标是实现发射功率p达到其参考值p *。 根据式(3)并考虑再生条件,发送功率P可以统一为单相移(SPS)控制模式中的p,而无需这些常数参数,例如L,Ts和n,
组合(13)和(14),为了确保统一发射功率p达到统一功率参考p *(p = p *),可以导出相移比D,
从(15),虚拟期望输出电压U * v应满足以下范围
虚拟期望输出电压U * v可以从用于调整输出电压的电压PI控制器产生。根据(15),VDPC方案的控制框图可以在图5中示出。在如图6所示的VDPC方案中。 6,在每个采样或控制间隔开始时,控制系统应对输出电压Uo,输入电压Uin和负载电流io进行采样。基于PI的电压控制器的输出值被设置为虚拟期望输出电压U * v。然后,相对于期望输出电压U * o,期望虚拟输出电压U * v,输入电压Uin和负载电流io,可以描述并示出相移比D的数学表达式(15)。最后,可以从具有相移比D的单相移(SPS)调制器产生开关驱动信号。请注意,所提出的VDPC的思想也可以扩展到与双相移(DPS )[29],扩展相移(EPS)[4]和三相移相(TPS)[30]控制方案。由于纸张长度限制,本文不会推导和报告这些相移比的表达式。
图6.DAB直流-直流转换器提出的VDPC方案的框图
与图5中的MPS方案不同,这些参数包括电感L,变压器比n和开关周期Ts在VDPC方案中不是必需的。 所提出的VDPC方法对这些参数不敏感。 此外,即使转换器和控制系统之间的这些采样值的比例不准确,VDPC方案的动态性能也不会受到影响。 例如,如果存在采样输入电压的不准确比例性,则虚拟的所需的输出电压将从PI相应地调整
控制器以获得所需的输出电压。因此,VDPC方案对传感器的采样比例也不敏感。此外,传统的电压环(TVL)控制是采用 输出电压PI控制器产生相移比,
直。 根据现有的电流前馈控制[23-24]和结合TVL控制理念,负载电流前馈(LCFF)控制的框图如图7所示。 在LCFF控制方案中,相移比D可以表示为
其中k是负载电流io的前馈比。 通过使用负载电流前馈,所采用的变换器可以在负载变化下实现更好的动态响应。
图7.DAB转换器的LCFF控制框图
4 小信号建模和干扰分析VDPC方案
直接估计VDPC方案中的相移比,而不需要PI控制器。 因此,系统稳定性主要受采样输出电压,输入电压和负载电流影响,涉及计算而不是PI控制器。 PI控制器用于补偿计算模型和物理系统之间的差异。 因此,在本节中,通过小信号模型分析在稳态下讨论了对采样输出电压,输入电压和负载电流中的这些干扰的输出电压的影响。 这些采样电压
并且电流和电流干扰由这些电压和电流传感器和传感器接口电路引起。 假设采样的输入电压和负载电流是准确的,并且在输出电压中存在小信号扰动。
Uo足够小,所计算的相移值d可以表示为,
根据(15),相移值D的偏导数
相对于输出电压Uo可以表示为,
此外,受控发射功率可以表示为,
其中,Delta;P是功率波动,忽略高阶扰动,受控发射功率可以进一步表示为,
图8.DAB系统的输出电路等效电路
DAB系统的次级可以被简化[31],如图8所示。 在这个等效电路中,当电源纹波传递到RC网络时,输出电压将从Uo充电到Uo,Uo是最终输出电压值。 输出功率纹波可表示为
其中,Delta;Uo是输出电压波动,并表示为结合(19),(21)和(23),由扰动值Uo引起的输出电压波动Delta;Eo可以进一步表示为,
类似地,假设采样输出电压和负载电流是准确的,并且这些是输入电压中的扰动。 相移值D相对于输入电压Uin的偏导数可以表示为,
然后,由扰动值Uin引起的输出电压波动可以表示为,
假设采样输出电压和负载电流是准确的,并且这是负载电流值中的扰动io。 相移值D对负载电流io的偏导数可以表示为,
然后,由扰动值io引起的输出电压纹波可以表示为,
在稳定状态下,输出电压Uo近似等于所需的输出电压U * o,以及组合(24),(26)和(28),并且Uin,Uo和io中的这些干扰不能改变功率 传输直接影响他人。 因此,输出电压波动Delta;Uo可以进一步表示为(29)。根据(29),输出电压波动Delta;Eo相对于这些扰动值Uo,Uin和i
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141208],资料为PDF文档或Word文档,PDF文档可免费转换为Word

