英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
在线光学层析成像检测系统测量固体的直径和透明的对象
摘要:本文介绍了电荷耦合器件(CCD)线性传感器和激光二极管在光学层析成像(OPT)系统中的应用。OPT是一种非侵入性和非侵入性的断层扫描系统,由一个带探测器的发射器组成。本文旨在分析和证明采用光电耦合器件的激光探测和在清水中测量晶体直径的能力。用过使用该硬件和软件开发,对静态固体和透明物体进行了检测和捕获实验。采用统计工程方法对实验数据进行了分析和验证。本文还研究了传感器视图数目和目标不透明度水平的影响。综上所述,本文成功地研发了一种OPT系统,该系统能够检测非流动的清水中不同不透明度的结晶的外观和直径。
索引项:光学层析系统,激光,电荷耦合器件,不透明度,图像重建,测量。
- 介绍
医学领域自1950年开始使用断层扫描方法,并于1990年推广到工业领域。断层扫描系统适用于需要非侵入性和非侵入性监测系统的应用,特别是在处理多相流动的问题。光学层析成像(OPT)是最好的方法,因为这种方法由硬场传感器[2]组成,这种传感器不随着被分析对象的电导率或介电常数的变化而变化。一个OPT系统提供了一个良好的空间分辨率,因为它可以捕捉一个非常详细的图像,而不使像素可见。OPT还提供高速数据采集系统,适用于在线监测系统应用程序[3]。可用的低成本多相探测器通常使用侵入式和侵入式技术。这些技术要求探头需要定期维护以避免采集不准确的数据 。
可用的非侵入式和非侵入式多相探测器体积庞大,电路复杂,涉及造影剂,并且会发射危险的辐射波。非侵入式和非侵入式多相探测器(如电容层析成像(ECT))导致图像重建的分辨率较差。
目前使用探针或软场传感器的技术具有其局限性。对于探头而言,它会影响流动稳定性。同时,对于电容或电阻层析成像等软场传感器而言,它们的空间分辨率较低。对于使用白光的OPT系统而言,物体检测仅局限于固体物体,因为透明物体将充当棱镜,将白光衍射到其基本光谱中。因此,将获得不准确的数据。本课题的目的是利用电荷耦合器件(CCD)线性传感器和激光二极管与LabVIEW软件相结合的方法,建立起一个检测多相流的OPT系统,有助于克服上述问题。
带电荷耦合器件的光学系统的基本原理类似于单光子发射计算机断层扫描(SPECT)的概念,在这个概念中,SPECT伽马的源光子被转换成可见光。然后,这种可见光被光电倍增管转换成电信号。这两个系统的区别在于它们的应用和使用的传感器类型不同。SPECT主要用于医疗目的,需要使用造影剂[7]。SPECT利用伽马射线作为发射器,从而显现患者的所遭受的辐射。然而,所建议的OPT系统承诺为多相流量测量的在线工业检测提供一个非侵入性、非侵入性和无害的辐射系统。这种硬件开发能够在不使用造影剂的情况下检测不透明和透明的物体,造影剂会干扰多相介质的稳定性。
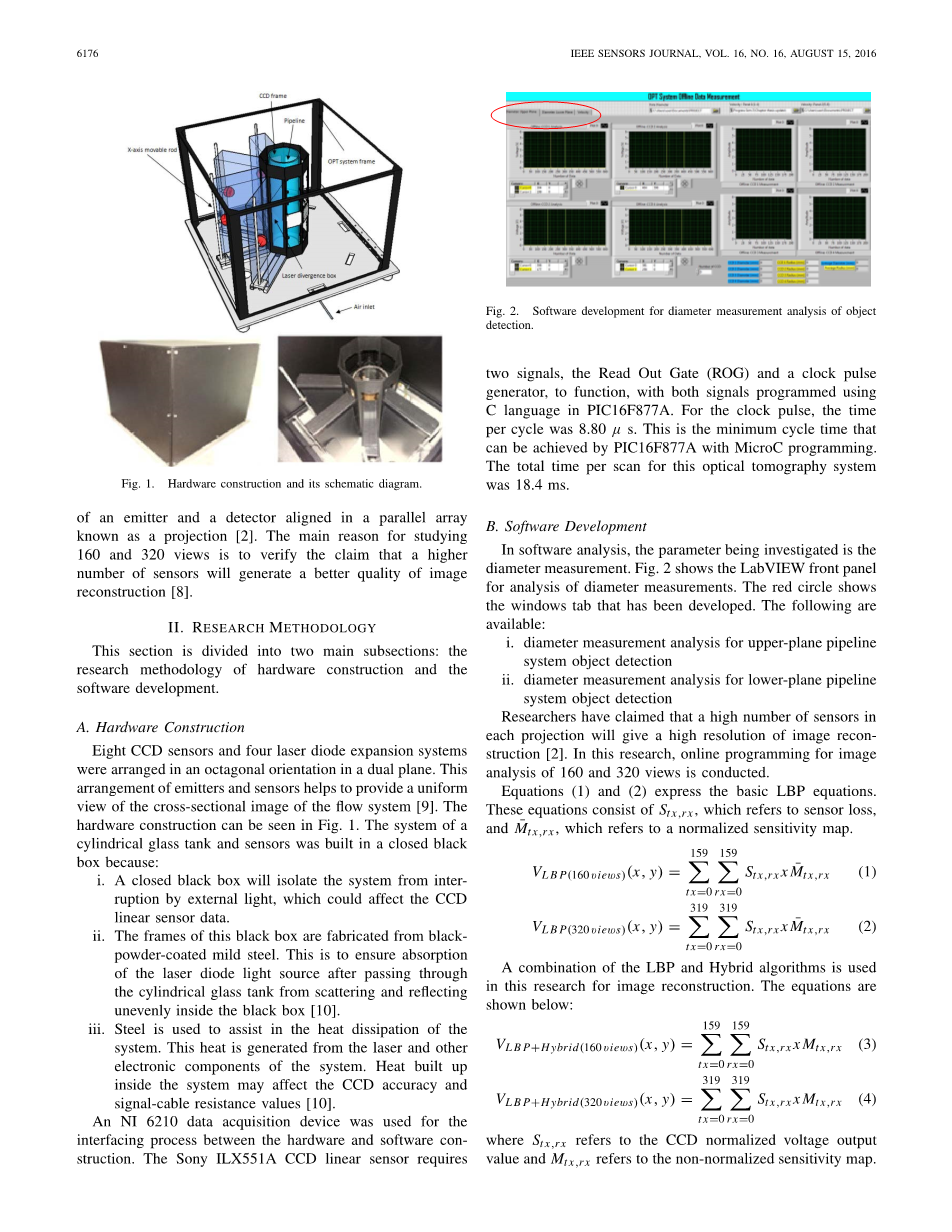
使用LabView和Minitab软件进行定性和定量分析。Minitab软件用于统计分析,而LabVIEW编程用于测量物体直径,并且生成用于在线数据的横截面多相介质图像。此段介绍了结合混合滤波和图像滤波算法的线性反投影(LBP),并将LBP应用于160视图和320视图的图像重建分析。捕获的图像以64*64图像分辨率显示,但视图数量不同。“观点”是包含一个发射极和一个探测器的单个组合的术语并且是平行排列成一个被称为投影的阵列。学习160和320个视图的主要原因是为了验证这样一种说法,即更多的传感器将产生更好的图像重建质量。
- 研究方法论
本节分为两个主要小节:硬件结构和软件开发的研究方法。
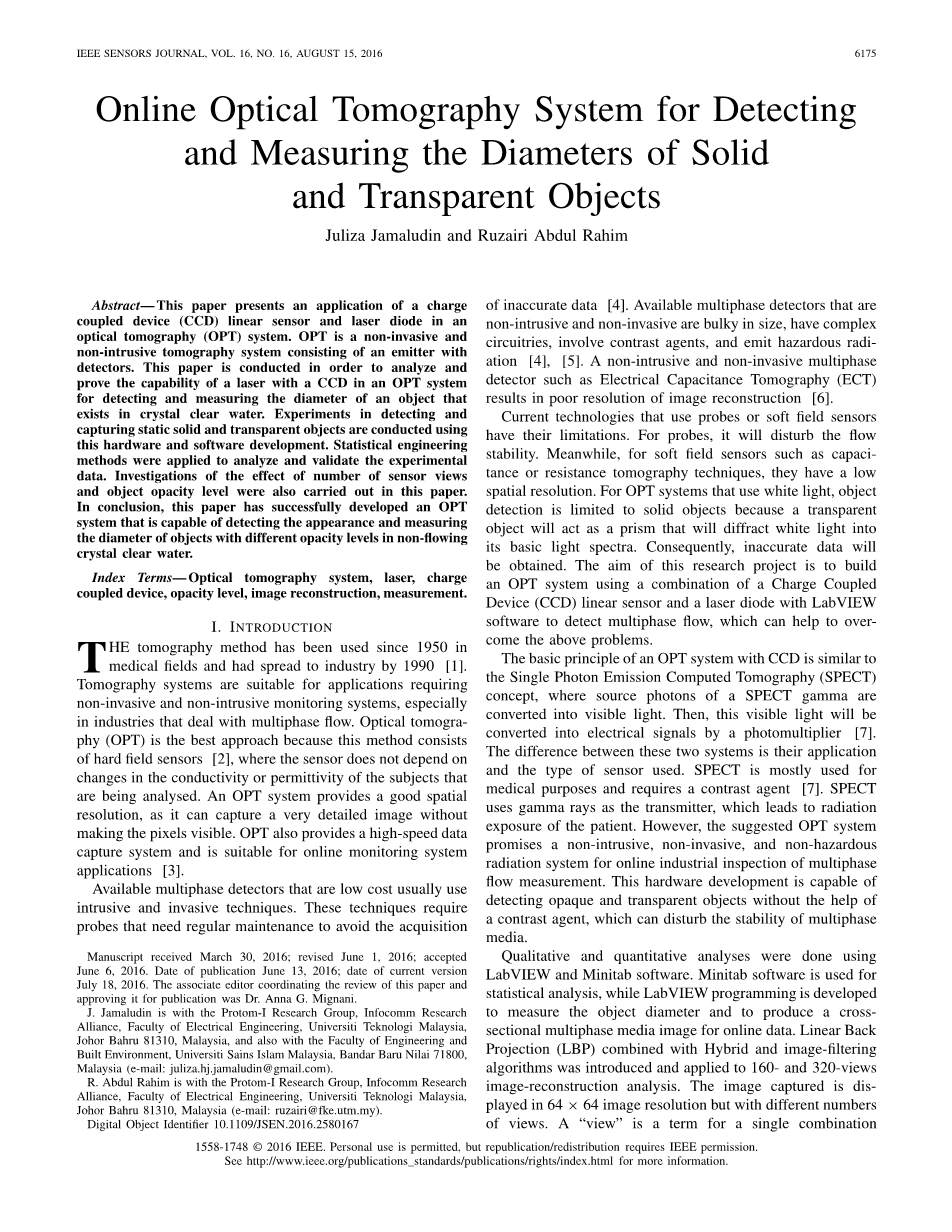
a.硬件结构:八个CCD传感器和四个激光二极管扩展系统在一个双平面上呈八角形排列。发射器和传感器的布置有助于提供气流系统横截面图像的统一视图。由圆柱形玻璃罐和传感器组成的系统是在一个封闭的黑盒子中构建的,因为:
1.用一个封闭的黑匣子将系统与外界光线的干扰隔离开来,这可能会影响CCD线性传感器的数据。
2.这个黑盒子是用黑粉涂层的低碳钢制造的。这是为了确保激光二极管光源在通过圆柱形玻璃罐之后被吸收,以避免黑匣子内部的散射和反射不均匀。
3.钢被用于帮助系统散热。这种热量是由激光器和系统的其他电子元件产生的。系统内部积聚的热量可能会影响CCD精度和信号电缆电阻值。采用NI 6210数据采集装置实现了硬件与软件的连接。索尼ILX551A CCD线性传感器需要两个信号,即读出门(ROG)和时钟脉冲发生器,用于应变量,两个信号均使用PIC16F877A中的C语言编程。对于时钟脉冲,每个周期的时间为8.80mu;S.这是使用MicroC编程通过PIC16F877A便可以实现的最小循环时间。该光学断层扫描系统每次扫描的总时间为18.4 ms。
三.实验装置
所有实验均在室温25-33°C完成,并且在相对湿度65-85%的环境下进行。由于光散射和衍射效应最小,这两者在计算中被忽略。在完全非流态结晶清水实验中,激光的亮度保持在0.3勒克斯。使用uni-tut381勒克斯计测量激光勒克斯值。以下是本研究所涉及的实验列表:
1.验证用于由LabVIEW编译的检测和测量单个静态物体直径的FLOF-OPT系统的实验。
2.对每次扫描捕获的两个不同物体进行探测和直径测量的实验。本研究的结果和讨论集中在:
1)分析在线CCD光学系统在静态结晶清水中捕获静态单目标图像和直径的能力。
2)分析在线电荷耦合器件(CCD)选择系统在静态结晶清水中捕获静态多目标图像和直径的能力。应用统计工程方法,利用Minitab16软件对实验数据进行分析和验证,进行统计计算。数据评估基于p值。p值被称为达到显著性水平的值,其中p值小于0.05意味着可以拒绝无效假设(h0),并且可以接受替代假设(h1)。同时,采用LabVIEW编程进行在线图像重建。
四.实验结果与讨论
通过一系列实验评估该系统捕获和测量不同不透明度物体的能力。所涉及的物体是一根实心棒和一根玻璃棒。
A.OPT系统捕获单静杆直径测量的能力分析
为了获得目标直径值,必须首先用游标卡尺测量物体。已知的准确度游标卡尺的误差为plusmn;0.01 mm,而光学系统的误差为plusmn;0.0001 mm。根据游标卡尺读数,实心杆的直径为8.54 mm。在之前的实验中,玻璃棒采用了与实心棒相同的程序。玻璃棒的直径记录为6.51mm。这两个值分别用作目标平均值。
在使用OPT系统测量固体和透明棒的实验中,共观察到50个数据。图片显示了用于测量实心杆直径的LabVIEW编程前面板的示例。
在这个软件开发中,每个CCD图形窗口都有两个可调节的光标,用于分析物体的直径。右边的另外四个图是所选时间范围的标准化图。光标放置在中上和中下曲线上,因为该点的值高于3 V。该方法将根据以下实验得出的测量结果,给出一个plusmn;0.0014的数据误差。这种OPT开发能够测量物体直径在0到28.67毫米之间。该范围取决于索尼ILX551A敏感像素的总长度。
1)结晶清水中静态物体直径的t检验分析:利用T检验验证了OPT系统测量静态物体直径的能力。本次评价共获得50个相同测量对象直径的数据,主要目的是比较OPT捕捉到的测量直径。系统用游标卡尺测量实际直径值。本分析涉及的两个假设如下:
H0:实验静态物体直径数据的平均值=用卡尺测量的静态物体直径数据。
H1:实验静态物体直径数据的平均值=用卡尺测量的静态物体直径数据。
a)使用t检验对实心杆进行假设分析:用Minitab16软件生成一个图形图表,以直观地了解每个评估,如图4所示,这些图表被称为单独的数值图,其中红点显示数据样本的分布情况,X线等于样本平均值,蓝线表示可接受的平均范围,浅红色圆圈表示目标实心棒的直径值。如果p值大于0.05,则不能拒绝无效假设。换句话说,样本平均值等于目标平均值。
(1)实心杆上平面数据测量总结(t-试验p-值=0.112):实心杆在OPT系统所显示的上平面数据的P值大于0.05;因此,我们未能拒绝无效假设。结果表明,在单样本t检验的基础上,上平面光学系统测得的实心杆直径的平均值与用游标卡尺测得的实心杆直径的平均值在统计学上是一致的。
(2)实心杆下平面数据测量总结(t-试验p-值=0.130):实心杆在OPT系统所显示的下平面数据的P值大于0.05;因此,我们未能拒绝无效假设。结果表明,在单样本t检验的基础上,下平面光学系统测得的实心杆直径的平均值与用游标卡尺测得的实心杆直径的平均值在统计学上是一致的。
图4
b)使用t检验对玻璃棒进行假设分析:玻璃棒t-试验结果的图形总结如图5所示。用于上下平面OPT系统测量。
(1)玻璃棒上平面数据测量总结(t-试验p-值=0.172):玻璃棒在OPT系统所显示的上平面数据P值大于0.05;因此,我们未能拒绝无效假设。结果表明,在单样本t检验的基础上,上平面光学系统测得的玻璃棒直径平均值与游标卡尺测得的玻璃棒直径平均值在统计学上是一致的。
(2)玻璃棒下平面数据测量总结(t检验p值=0.229):玻璃棒在OPT系统所显示的下平面数据P值大于0.05;因此,我们未能拒绝无效假设。这表明,基于一个样本t检验,平均值下平面光学系统测量的玻璃棒直径与用游标卡尺测量的玻璃棒直径值在统计学上是一致的。
图5
2)静态物体上下平面数据测量的方差分析:在数据分析这一部分,应用方差分析试验研究了上下平面选择系统测量相同静态物体直径的能力。根据方差分析检验,统计显著值或p值低于0.05意味着必须拒绝无效假设,并且可以接受替代假设。上下平面静态物体直径测量的假设如下:
H0:上平面单个静态物体直径测量的样本平均值=下平面单个静态物体直径测量的样本平均值
H1:上平面单个静态物体直径测量的样本平均值=下平面单个静态物体直径测量的样本平均值
(1)静态实心杆直径上下平面测量的方差分析试验:图6显示了固体棒样品的方差分析测试结果。图6显示了从上下平面测量的实心杆数据的单个值图。方差分析所得到的P值等于0.895,大于0.05。从上下平面观察到的实心杆的平均值分别为8.5536和8.5553 mm,标准偏差分别为0.0594和0.0704。在95%置信区间内,两组的均值和准差相互重叠。结果表明,对固体杆实验的零假设是可以接受的。结果表明,上下平面光学系统都是在同一根实心棒上测得的。
(2)静态玻璃棒直径上下平面测量的方差分析试验:图7显示方差分析玻璃棒样品的试验结果,显示从上下平面测量的玻璃棒样品数据的个别值的图表。图7所示,上下平面观测到的玻璃棒平均值分别为6.5221和6.5224 mm,标准差分别为0.0618和0.0717。在95%置信区间内,两组的均值和标准差相互重叠。p值等于0.985,大于0.05,此玻璃棒实验允许接受零假设。得出的结论是,上下平面选择系统的确是测量了同样的玻璃棒。
图6
图7
B.同一时间扫描多个物体的直径分析
与之前的实验一样,本实验使用了相同的物体,即直径为8.54 mm的实心杆和直径为6.51 mm的玻璃杆。图8说明了在OPT系统覆盖区域中的这两个杆的位置。每一平面都收集了数百个测量数据,包括50个玻璃棒图像数据和50个固体棒图像数据。
- 使用方差分析对OPT测量系统的上下平面进行假设测试,以便在同一时间扫描中捕获多个对象:在本小节中,为了分析数据,进行了四次方差分析测试。描述统计和箱线图的左右侧图像图。这个箱形图图表是用来表示一个图形的数据总体。当将数据组A和B与玻璃和实心棒的参考值以及数据组C和D与玻璃和实心棒的参考值进行比较时,此图有助于可视化结果的统计分析。
图8
分析将包括证明,当两个直径和位置不同的物体存在于OPT系统的两个平面的管道系统中时,CCD将捕获图像直径数据位置。
a)左侧影像数据方差分析及与玻璃棒直径的比较:本次方差分析的假设如下:
H0:从左侧上平面获得的样品平均直径=从左侧下平面获得的样品平均直径=用游标卡尺测量的玻璃杆直径
H1:从左侧上平面获得的样品平均直径=从左侧下平面获得的样品平均直径=图中用游标卡尺测量的玻璃杆直径。图10和11所示,方差分析测试结果表明,左侧图像数据的平均值为上和下平面等于用游标卡尺测量的玻璃杆直径。这是因为p值等于0.930,大于0.05,所以我们不能拒绝无效假设。在95%置信区间内,上下平面获得的玻璃棒直径和左侧数据相互重叠。在这里,我们可以得出这样的结论:从两个平面上观察到的左侧图像数据与玻璃棒的图像数据有偏差。
b)左侧图像数据的方差分析检验及与实心杆直径的比较:本次方差分析的假设如下:
H0:从左侧上平面获得的样品平均直径=从左侧下平面获得的样品平均直径=用游标卡尺测量的实心杆直径
H1:从左侧上平面获得的样品平均直径=从左侧下平面获得的样品平均直径=用游标卡尺测量的实心杆直径
图10
图11
方差分析结果表明,从上下平面获得的左侧图像数据的平均值不等于用游标卡尺测量的实心杆直径。这是因为p值等于0.000,小于0.05,因此我们拒绝了无效假设。在95%置信区间内,实心杆直径左侧上面的和降低数据做不重叠用一另一个。在这里我们可以得出结论左边的那个图像数据对于两个平面的观测,不影响固体棒的图像数据。
c)右侧图像数据的方差分析检验及与实心杆直径的比较:本次方差分析的假设如下:
H0:从右
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[609525],资料为PDF文档或Word文档,PDF文档可免费转换为Word

