英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
露天开采地貌特征描述
陈建平、李可(中国北京,中国地质大学地球科学与资源学院,邮编100083)
郭振昌(台湾台北,国立台北科技大学土木工程系,邮编10654)
Giulia Sofiac、 Paolo Tarolli (意大利莱尼亚罗(PD)大学路16号,帕多瓦大学Agripolis系,土地环境、农业和林业,邮编35020)
摘要:
在地球上的人造地形标志中,露天矿是非常重要的。由于采矿对地质灾害和过程的影响,地理学家和环境研究者对采矿非常感兴趣。此外,由于许多国家发生过多起伤害事故,露天矿山和采石场被认为是最危险的工作场地。他们快速、准确、低成本的调查也代表着地球科学界的一个挑战。这项工作的目的是使用高分辨率地形和最近公布的景观度量来描述露天开采的特征,即SLLAC(Sofia等,2014)。新的步骤除了计算相关长度,还要计算平台的方向,还要通过测试简单的经验模型推导出虚拟表面的比率。研究主要集中在两个位于北京地区(中国)的铁矿的主要案例。主要的地形信息(数字表面模型,DSM)是使用无人驾驶飞行器(UAV)和运动结构(SfM)摄影测量技术推导出的。结果强调了所采用的方法和调查技术在描述主矿的地貌特征方面的有效性。由于SLLAC技术,露天开采或露天采矿用于提取铁的平台被自动描绘,从而允许研究人员快速测量露天平台所覆盖的地表。这一信息可以作为今后研究的起点,(i)可以进行长时间调查以跟踪矿山范围的变化,(ii)将矿区范围与该地区的污染、侵蚀等联系起来,(iii)以及将这两点结合起来,分析与侵蚀变化相关变化的影响 。相关长度方向的分析也使研究人员能够识别平台的方向并了解露天采区的形状。给定采场的构造环境和发展史可以确定其失效与否、如何失效以及地表或挖掘面的方向,与地质特征的取向一样具有重要的意义。因此,所提出的方法可为可持续环境规划的大规模和低成本地形测量提供基础,例如,减轻由于采矿造成的环境人为影响。
copy; 2015 Elsevier B.V.保留所有权利。
1.介绍
目前人造景观覆盖了大量的地球表面(Ellis,2004;Foley等,2005;Tarolli,2014)。在这些景观中,表面形态的直接人为干扰是有重要意义的(Ellis等, 2006;Ellis, 2011;Vanacker 等, 2014)。旨在满足人类需求的增加集约化农业和工业化以及城市化,通过改变地形、植被覆盖、土壤的物理和化学性质以及土壤水分平衡,来改变自然景观(Tarolli 等, 2014)。人造景观中人和景观相互作用的分析代表了更好地理解我们当今环境演变的一种挑战。这种分析有助于将综合环境规划转向可持续发展,并可以减轻人为变化的后果(Tarolli等,2015)。在人为的最明显的景观(如道路网络和农业生产,如台阶)中,露天矿是非常重要的。矿业是现代社会不可或缺的一个组成部分,有着悠久的历史,并且在许多地貌环境中都存在。无论是在采矿期间还是在开采后,开采活动都对集水区的地貌和水文有显著的影响(Hancock 等, 2008; Herrera等, 2010)。根据Wilkinson(2005)的调查,人类在各种建设活动中移动越来越多的岩石和沉积物成为了一种地质作用。由于地质灾害和过程的影响,地质学家和环境研究人员也开始关注矿业(Mossa 和James,2013)。露天开采对土地施加了严重的生态影响,影响了植被、土壤、基岩和地貌的变化(Martiacute;n-Duque 等,2010),这些都是有利于表面水文、地下水位和流动路径的变化(Osterkamp 和Joseph,2000;Nicolau 和 Asensio,2000)。此外,在许多国家,例如英国(如Foster等,2008年)、南非(如Hermanus,2007年)、美国(如Esterhuizen和Guuml;rtunca,2006)和中国(Zhangtao,2010),露天矿山和采石场都被认为是最危险的工业部门。最近的一项统计研究将中国煤矿列为全国三大死亡来源之一(Zhangtao,2010)。其他发展中国家的数据无法使用,但媒体提供了全球采矿业当前状况的一些技术指标,绘制了一个相似的图片(Badri等,2011)。
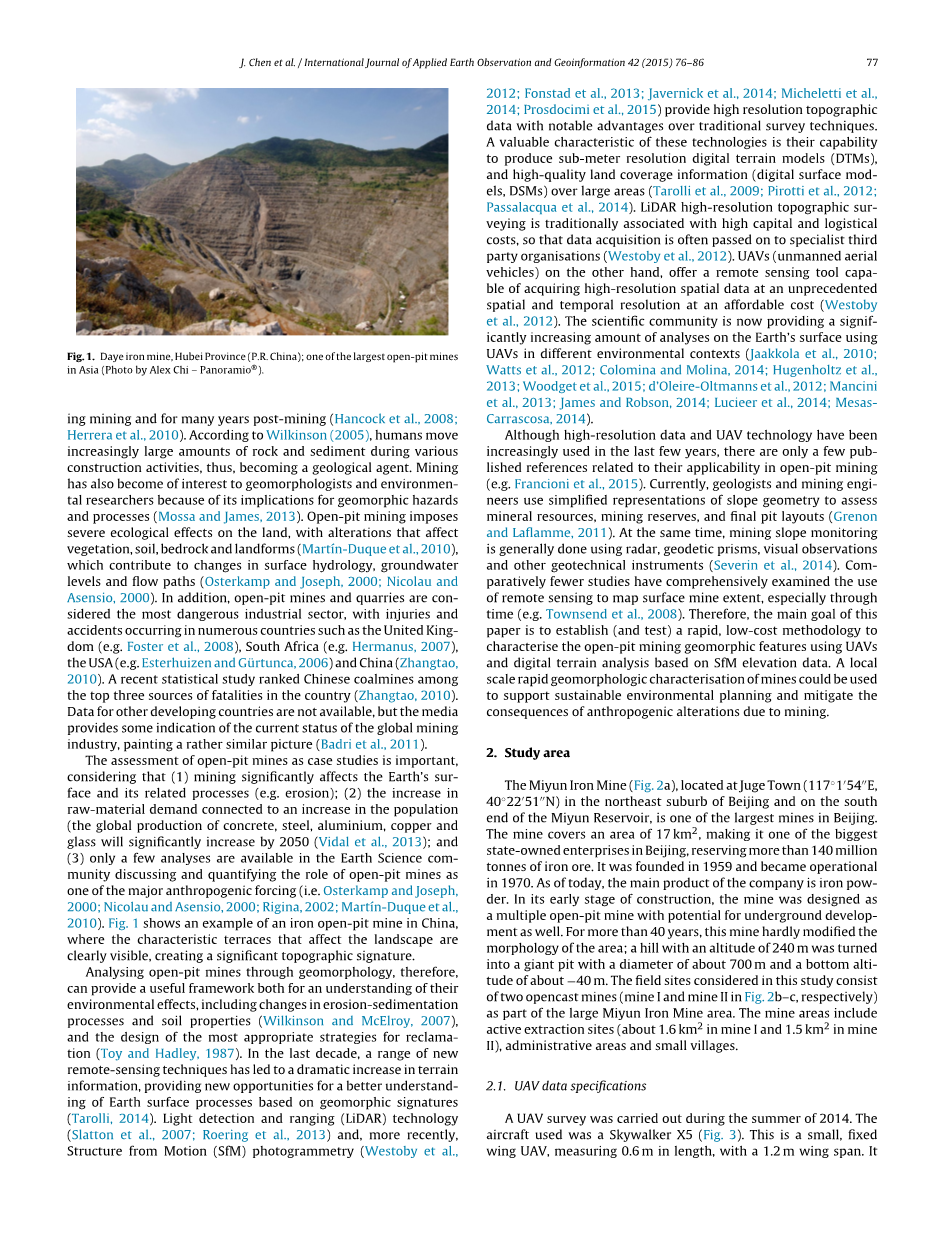
露天矿作为案例研究的评估是非常重要的,考虑到(1)开采显著影响地球表面及其相关过程(例如侵蚀);(2)与人口增加相关的原材料需求增加(到2050年,全球混凝土、钢铁、铝、铜和玻璃的产量将显着增加(Vidal等,2013);以及(3)在地球科学界有为数不多的分析,将露天矿作为主要的人类活动( 例如 Osterkamp和Joseph, 2000;Nicolau 和Asensio,2000;Rigina,2002;Martiacute;n-Duque 等, 2010)。图1所示的是中国露天铁矿的例子,其中台阶清晰可见,这是一种显著的地形特征。
因此,通过对露天矿的地形分析可以为理解其对环境的影响提供有用的框架,包括侵蚀、沉积过程和土壤性质的变化(Wilkinson和McElroy,2007),以及设计最合适的开垦策略 (Toy和Hadley,1987)。在过去十年中,一系列新的遥感技术使地形的信息量急剧增加,为更好地了解地表形成提供了新的机会(Tarolli,2014年)。光检测和测距技术(LiDAR)(Slatton等,2007; Roering等,2013)以及近期的运动结构摄影测量技术(SfM)(Westoby等,2012; Fonstad等,2013; Javernick等,2014; Micheletti等,2014; Prosdocimi等,2015)提供了高分辨率地形数据,这具有优于传统测量技术的显著优点。这些技术的一个有价值的特征是它们在大面积上产生分米级的分辨率数字地形模型(DTM)和高质量土地覆盖信息(数字表面模型,DSM)的能力(Tarolli等,2009; Pirotti等,2012; Passalacqua 等,2014)。光检测和测距技术(LiDAR)高分辨率地形测量通常与高资本和物流成本相关,因此数据采集经常传递给专业的第三方组织(Westoby 等,2012)。另一方面,无人驾驶飞行器提供了一种能够以更低的成本获取高分辨率空间数据的遥感工具(Westoby 等,2012)。科学界现在能在地表上不同的环境背景下使用无人机进行分析工作(Jaakkola 等, 2010; Watts 等,2012;Colomina 和Molina,2014;Hugenholtz等, 2013;Woodget 等, 2015; drsquo;Oleire-Oltmanns 等, 2012;Mancini 等,2013; James 和 Robson,2014;Lucieer 等, 2014;MesasCarrascosa,2014)。
虽然高分辨率数据和无人机技术在过去几年中被广泛地使用,但只有少数已公布的参考文献有涉及其在露天开采中的使用(如Francioni等,2015年)。目前,地质学家和采矿工程师使用边坡几何简化表示法来评估矿产资源、储量、最终坑位布局(Grenon和Laflamme,2011)。同时,矿山边坡监测一般使用无线电探测、光学仪器、视觉观测和其他岩土测量仪器(Severin等,2014)。只有少数研究使用遥感技术来绘制地表地貌的情况,尤其是通过时间观测(如Townsend等,2008)。因此,本文的主要目标是建立和测试一种快速、低成本的方法来描绘露天开采地貌特征,例如使用无人机和SfM数字地形分析。 局部地形地貌特征可用于支持环境可持续发展,并减轻由于采矿引起人为破坏的后果。
2.学习区域
密云铁矿(图2a)位于北京东北郊的巨各庄镇和密云水库南端,是北京最大的矿山之一。
该矿区占地面积17平方公里,是北京最大的国有企业之一,储量超过10.4亿吨铁矿石。它成立于1959年,于1970年投入运营。截至今天,公司的主要产品是铁粉。在其建设的早期阶段,该矿设计为具有潜在地下开发潜力的露天矿区。 40多年来,这个矿区几乎没有改变该地区的形态;一个高度为240米的山丘变成一个巨大的坑,直径约700米,底部高度约为-40米。本研究中考虑的场地包括两个露天矿(分别为图2b-c中的矿I和矿II)是大型密云铁矿区的一部分。矿区包括活动开采场(矿I的约1.6平方公里 和 矿II的1.5平方公里)以及行政区和小村庄。
2.1 UAV数据规格
有一项UAV调查在2014年夏天进行。使用的飞机是天行者X5(图3)。这是一个小的固定翼无人机,长度为0.6米,翼展1.2米。它的重量小于2.5公斤,使用四芯3500毫安的锂离子聚合物电池飞行长达40分钟。由于装配有自动驾驶仪,无人机可以自主地沿着预定义的飞行路径飞行,并以一定的时间间隔拍照,同时还与地面控制系统(GCS)进行无线电通信。无人机使用配备有Carl Zeiss 10.4-37.1mm透镜和1.0 Exmor R CMOS传感器的Sony QX100照相机(20.9M像素分辨率)(图3)获得彩色照片。表1和表2显示了矿I和 矿II的飞行特性;受限于无人机的规划和续航能力,调查是分别为两个地点计划的。在图像采集和调查之前,我们校准了摄像机并设置了高精度地面控制点(GCP)(矿井I有13个,和矿井II的10个)用涂漆做了0.2times;0.2米宽的标记。为了更容易被看见,GCP都被放置在人为标志附近并且在测量之前使用D-GPS测量。
2.2 数字表面模型
应用SfM技术以获得3D地球参考点云,从其中导出数字表面模型(DSM)。使用Agisoft PhotoScan摄影测量软件包(版本v1.0.4,1847,下载地址http://www.agisoft.com/)。 所考虑的工作流程包括以下主要步骤:(1)图像导入,(2)图像对准,(3)地理参考,(4)图像对准的优化和(5)点云的创建。 在对准之后,所有照片被定向,并且原点云要有地理参考。 基于预计的摄像机位置,PhotoScanreg;会计算出要合并单个点云数据的摄像机的深层次信息。 然后,考虑到更高的精度和重建结果,会用GCP优化相机位置和数据取向。 表3反映了通过SfM方法获得的着x、y和z轴3D点云沿和由PhotoScanreg;计算的地理分化误差。
在产生点云之后,再使用开放源程序CloudComparereg; (http://www.danielgm.net/cc/)进一步操作点。进一步过滤点,用以除去影响这些数据的噪声, Javernick等人也强调了这点。 在这种情况下,手动完成噪声去除:事实上,完全在矿场范围之外的离群值也清晰可见。
图3表示为两个研究矿山着上RGB颜色的SfM点云的3D视图。 然后使用已被证明(Pirotti和Tarolli,2010; Lin等人,2013; Tseng等人,2015)能用于地貌分析的自然相邻法(Sibson,1981)生成1米分辨率的DSM图。 通过与地面差分,GPS(DGPS)比较评估的垂直精度(RMSE-海拔均方根误差)在平坦区域中估计为大约0.1m,这与先前对UAV和SfM的作业一致。
3.方法
3.1 SLLAC
露天矿的特征是基于所提出的形态学指标(SLLAC):它量化了斜率的局部自相似性。SLLAC主要用于识别细长构造而不考虑它们的陡度,而是主要考虑它们的斜率的变化性和相似性。这项工作从DSM开始,描述了诸如植被和建筑物等元素; 这些元素可能会导致图上出现波动。因此,使用时不考虑坡度陡度的参数才是合理的。在计算Evans (1980)提出的二次函数导数的斜率后,使用移动窗口(核)方法获得SLLAC。该过程包括两个步骤(图4):(1)计算在斜率方形模板(图4a中的T)和其相邻区域(图4a中的W)之间相关性(图4b);(2)一旦导出相关图,就可以计算相关的特征长度(图4c)。
根据Haralick 和 Shapiro (1992)和Lewis(1995)的描述,根据公式计算相关性(图4b):
(1)假定大小为Mtimes;M的相邻区域W和大小为Ntimes;N的正方形斜率模板T(图4),索引(i,j)是W内的每个像素的行和列位置,并且它们在 1le;ile;(M-N)和1le;jle;(M-N),而索引(u,v)跨越1le;ule;N且1le;vle;N。W是在左上角位于像素(i,j)上的斜率模板T下方的邻域W的局部平均斜率。T是斜率补丁的平均值。
通过选择对应于其最大值的37%(ISO 25178-2,2013)的互相关图(图4b)的阈值,我们可以导出相关长度(图4c),根据其定理,穿过中心像素并连接包括中心像素的提取区域中的两个边界像素的最长线的长度(图4c)。
通常,模板(T)的尺寸应该足够宽以至少获得在平台壁和台面台之间的斜率的变化。在具有不同平台尺寸的实数和模拟DTM上测试了固定尺寸的模板(10mtimes;10mu;m)和移动窗口W(100mtimes;100mu;m),因此证明了所选度量的可靠性、平台尺寸和形状的独立性。同样的实验表明,增加模板尺寸和内核导致计算时间的增加,因此不建议改变尺寸。因此,作为一般的方法,我们应用由Sofia 等人 (2014)所证明的原理(主移动窗为100 mtimes;100 m,斜坡板为10 mtimes;10 m),因为它们被证明适用于各种山地环境和台阶系统。
SLLAC图可以使用Spc参数(表面峰值曲率)进一步分析,允许使用者独特地表达表面特征。(Stout等人, 1994)Spc定义为每个(2)在该等式中,峰值被定义为其中所有八个相邻像素值较低的像素,n是考虑的峰值的数目,z对应于分析的映射值(在这种情况下相当于SLLAC值),x和y 表示单元间距。(Stout 等人, 1994)
3.2
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[140165],资料为PDF文档或Word文档,PDF文档可免费转换为Word

