英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
[1]用于极端损坏图像的边界识别噪声检测的切换中值滤波器
吴培英,马开光,IEEE高级会员
摘要:本文提出了一种具有强大的脉冲噪声检测方法(称为边界识别噪声检测(BDND))的新型切换中值滤波器,用于有效去噪极端损坏的图像。为了确定当前像素是否被破坏,所提出的BDND算法首先将以当前像素为中心的局部窗口的像素分为三组 - 较低强度脉冲噪声,未损坏像素和较高强度脉冲噪声。然后将中心像素视为“未损坏”,前提是它属于“未损坏”的像素组或“已损坏”。因此,鉴别这三个组的两个边界需要准确确定以产生非常高的噪声检测精度 - 在我们的情况下,实现零错误检测率,同时保持相当低的误报率,甚至高达70%的噪声损坏。四种噪声模型被考虑用于性能评估。在宽范围(从10%到90%)的噪声损坏下对单色和彩色图像进行的大量仿真结果清楚地表明,我们提出的开关中值滤波器在抑制脉冲噪声方面基本上优于所有现有的基于中值的滤波器,同时保留图像细节,但是,所提出的BDND算术简单,适合于实时和实时应用。
关键词:图像去噪,脉冲噪声检测,非线性滤波器,开关中值滤波器。
- 引言
在图像采集或传输过程中,DIGITAL图像可能被脉冲噪声污染。脉冲噪声的强度具有相对较高或相对较低的趋势。因此,可能会严重降低图像质量,并导致信息细节的一些丢失。已经提出了用于去除脉冲噪声的各种滤波技术,并且众所周知,线性滤波器可能产生严重的图像模糊。结果,非线性滤波器由于其脉冲噪声衰减和边缘/细节保存方面的滤波性能大大提高而得到广泛的利用。最普遍和鲁棒的非线性滤波器之一是标准中值(SM)滤波器[1],其利用滤波窗口内的像素强度的秩次信息,并用中值替换中心像素。由于其噪声抑制的有效性和实现简单,引入了SM滤波器的各种修改,如加权中值(WM)[2]滤波器和中心加权中值(CWM)[3]滤波器。
传统的中值滤波方法无条件地应用每个像素的中值运算,也就是说,不考虑它是否被破坏或损坏。结果,从未损坏的像素贡献的图像细节仍然被过滤,并且这导致图像质量下降。克服这个问题的直观解决方案是在滤波之前实现脉冲噪声检测机制;因此,仅识别为“已损坏”的像素将经历滤波处理,而被识别为“未破坏”的像素将保持不变。通过将这种噪声检测机制或“智能”并入中值滤波框架中,所谓的开关中值滤波器[4] - [11]显示出显着的性能提升。
早期开发的开关中值滤波器通常被发现不适用于给定但未知的噪声密度,并且易于产生像素错误分类,特别是在较高的噪声密度干扰下。为了解决这个问题,在[9]中提出了噪声自适应软切换中值(NASM)滤波器,其由三级分层软切换噪声检测过程组成。NASM在消除脉冲噪声方面实现了相当强劲的性能,同时保持了10%至50%范围内的宽范围噪声密度信号细节。然而,对于噪声密度大于50%的那些损坏的图像,由于错误分类的像素的数量急剧增加,恢复的图像的质量显着降低。
在本文中,我们提出了一种高精度的噪声检测算法,称为边界识别噪声检测
(BDND),可以处理甚至高达90%噪声密度的图像损坏。与修改的NASM中值滤波方案一起,所提出的BDND在滤波图像中的主观质量以及峰值信噪比(PSNR)测量中的客观质量方面表现出优异的性能的NASM过滤器。对于去除彩色图像,我们提出的BDND滤波器也一致地显示出迫切的结果。
本文分为五个部分,如下:第二部分介绍了我们提出的用于脉冲噪声识别的BDND算法。 第三节描述了对噪声检测结果的反应过滤方案。 第四节介绍了大量的模拟结果。 第五节总结本文。
AI.IMPULSE-NOISE检测
A.噪音模型
实现了四种脉冲噪声模型,用于考虑实际情况广泛地检查我们提出的滤波器的性能。每个模型详细描述如下。
1)噪声模型1:噪声被建模为盐和胡椒的脉冲噪声(例如[9])。像素通过两个固定的极值(0和255(8位单色图像))随机破坏,以相同的概率生成。也就是说,对于具有强度值的位置处的每个图像像素,噪声图像的对应像素将是其中概率密度函数为
p/2 for x=0
F(x)={ 1-p x=sip 模型1
P/2 x=255
噪音密度在P。
2)噪声模型2:对于模型2,它类似于模型1,除了每个像素可能被“胡椒”噪声(即0)或具有不等概率的“盐”噪声破坏。那是
噪音密度在p=p1 p2(p1ne;p2)
3)噪声模型3:不同于两个固定值,脉冲噪声可以通过两端分别以每个长度分别出现的两个固定范围更加逼真地建模。
例如,如果是10,噪声将相等可能是任何值
两者的范围。那是
噪音密度在P
4)噪声模型4:模型4类似于模型3,不同之处在于低强度脉冲噪声和高强度脉冲噪声的密度不相等。那是
噪音密度在p=p1 p2(p1ne;p2)
B.噪声检测
所提出的BDND算法被应用于噪声图像的每个像素,以便识别它是否是“未被破坏的”或“被破坏的”。在这样一个应用到整个图像之后,二维二进制决策图形成在噪声检测阶段,表示“未损坏”像素的位置的“0”,对于那些“被破坏”的像素,“0”表示“1”。为了实现这个目标,围绕被考虑的像素的预定义的窗口内的所有像素将被分组成三个簇;因此,需要确定两个边界。对于正在考虑的每个像素,如果像素将被分配给较低强度簇;否则,到高强度集群的中强度集群。
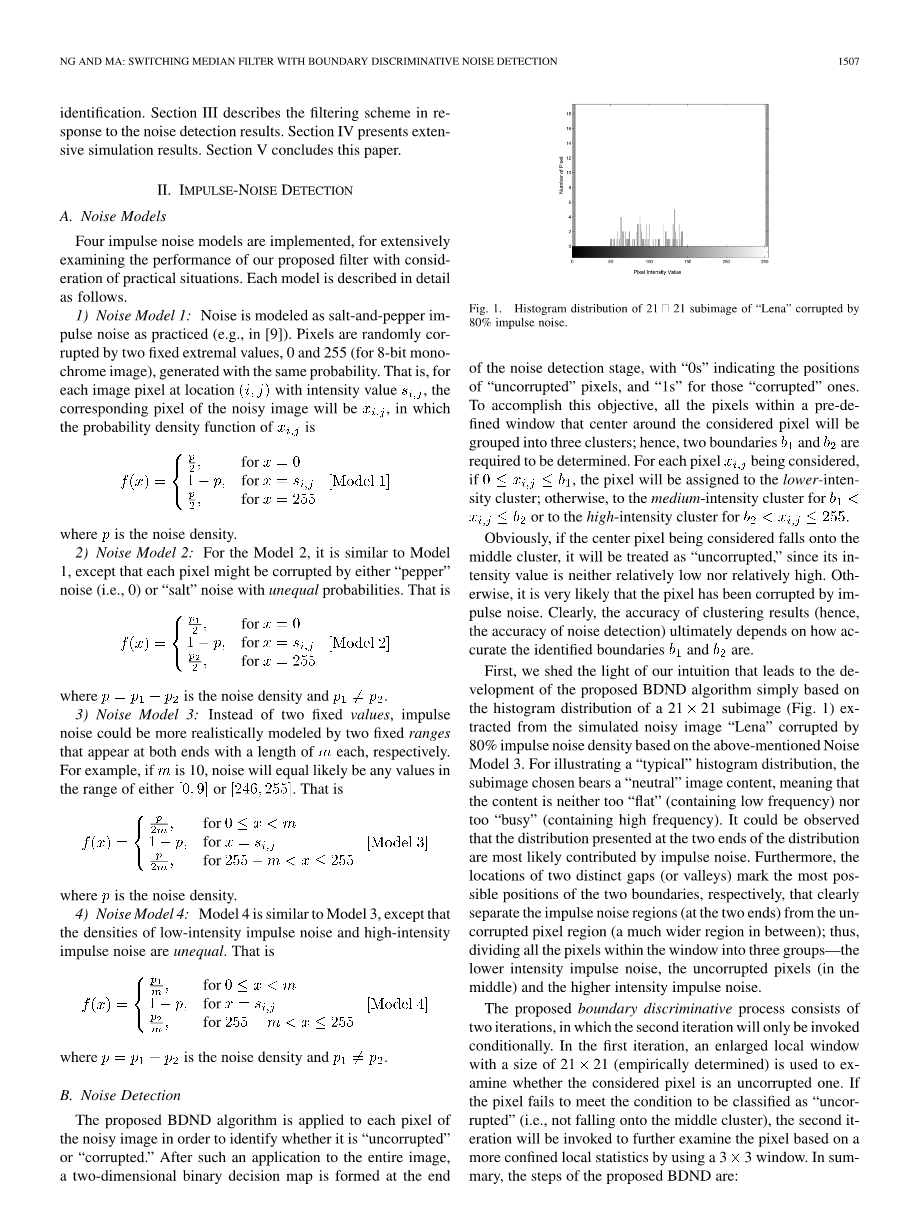
“Lena”的21 2 21子图像的直方图分布由80%的脉冲噪声损坏。
显然,如果被考虑的中心像素落在中间簇上,则它将被视为“未被破坏”,因为其密度值既不比较低也不相对较高。其次,像素已经被im脉冲噪声破坏了。显然,聚类结果的准确性(因此,噪声检测的准确性)最终取决于如何确定所识别的边界。
首先,我们揭示了我们直觉的光芒,导致所提出的BDND算法的发展,仅仅基于从模拟噪声图像“Lena”中被破坏的21 21子图像(图1)的直方图分布,基于上述噪声模型3的80%脉冲噪声密度。为了说明“典型”直方图分布,所选择的子图像具有“中性”图像内容,这意味着内容既不太“平坦”(含低频)也不太“忙”(含高频)。可以看出,在分布两端呈现的分布最有可能是由脉冲噪声引起的。此外,两个不同间隙(或谷)的位置分别标记了两个边界的最可能位置,这清楚地将脉冲噪声区域(两端)与未损坏的像素区域(更宽区域之间);因此,将窗口内的所有像素分为三组 - 较低强度脉冲噪声,未损坏像素(中间)和较高强度脉冲噪声。
所提出的边界判别过程由两次迭代组成,其中第二次迭代只会有条件地被调用。在第一次迭代中,使用尺寸为21 21(经验确定)的放大的局部窗口来排除所考虑的像素是否是未损坏的。如果像素不符合被分类为“不中断”(即不落在中间簇)的条件,则将调用第二次迭代,以通过使用更加局限的局部统计信息来进一步检查像素一个3 3窗口。总而言之,建议的BDND的步骤是:
步骤1)设置21 21窗口,该窗口以当前像素为中心。
步骤2)根据查询顺序对窗口中的像素进行排序,并找到排序向量的中值,med。
步骤3)计算排序向量中每对相邻像素之间的强度差,并获得差分矢量。
步骤4)对于0和med之间的像素强度
找到相同范围内的最大强度差异,并将其对应的像素标记为边界。
步骤5)同样地,边界被识别为med和255之间的象素强度;因此形成三个簇。
步骤6)如果像素属于中间群集,则将其标识为“未被破坏”的像素,并且分类过程停止;否则,第二次迭代将在以下内容中被激活。
步骤7)设置3 3窗口,围绕相关像素居中,并重复步骤2)-5)。
步骤8)如果所考虑的像素属于中间簇,则被分类为“未破坏”像素;否则“损坏”。
为了理解上述算法步骤,使用具有中心像素“202”(被盒装)的5 5(而不是21 21)窗口化的子图像作为示例来说明所提出的BDND处理如下:
bull;对于强度在0和med之间的像素,相应的最大差值为39,即像素强度0和39之间的差异。
bull;对于具有med和255之间的强度的像素,最大差异为98,即像素强度81和179之间的差异。
bull;因此,b1=0和b2=81。因此,较弱的集群是{0000000},中等强度集群是{394750627281},和更高的强度集群是{179,202,205,224,255,255,255,255,255,255,255,255}.
表格1
建议的窗口尺寸用于估计的噪声密度水平p
bull;由于中心像素“202”属于较高强度的聚类,因此需要调用第二次迭代,并以3中心为中心。
现在,像素强度被分类和表示矢量形式:。
bull;如前所述,计算强度差的向量:。
bull;第一个最大差值是202,这是差异在像素强度0和202之间最大差值为31,这是区别像素强度224和255。
bull;因此,b1=0,b2=224。 因此,强度较低集群是{0,0,0,0},中等强度集群是{202,224},和更高强度的集群是{255,255,255}.
bull;歧视过程结束时,中心像素“202”被归类为“未破坏”像素,因为它属于
到中间集群。
彩色图像噪声检测作为数字图像处理最直接使用的色彩空间,在我们的工作中选择RGB颜色空间来表示彩色图像。在RGB颜色空间中,每个像素在该位置可以表示为颜色矢量,其中,,是红(R),绿色(G)和蓝色(B)成分。嘈杂的彩色图像通过随机注入盐和胡椒噪声来建模并独立于这些颜色成分中的每一个。
也就是说,当彩色图像被噪声密度破坏时,这意味着每个颜色组件都被破坏。因此,对于每个像素,相应的像素的嘈杂图像将被表示为,其中每个颜色分量的概率密度函数可以是之前描述的噪声模型之一。在这项工作中,噪音模型1用于演示演示。将噪声检测算法扩展到损坏的过程彩色图像很简单。提出的BDND算法将简单地应用于R,G和B平面,并获得三个二进制决策图。
III噪声自适应滤波
尽管使整个开关中值滤波器具有噪声适应性的主要贡献来自上一节所述的脉冲噪声检测,本节讨论的后检测过滤也有助于整体去噪性能。基于[9]中描述的过滤过程,在后续的两个小节中,我们将强调这一方面,并在过滤阶段提供三个额外的改进。
第一列显示三个原始测试图像:(上)“Lena”(中间)“Peppers”和(底部)“Baboon”,第二列显示了噪声产生的80%脉冲噪声损坏的相应噪声图像模型1.
A.简化噪声密度估计
为了确定过滤窗口的窗口大小,需要首先确定最大窗口大小的限制。为此,表I是基于多个测试图像经验确定的,其中建议不同的窗口大小用于估计不同的噪声密度级别的腐败。为了进行噪声密度的估计,NASM涉及一组复杂的程序(如四叉树分解)[9]。相反,噪音密度在所提出的BDND中执行的估计要简单得多,就是通过对先前进行的脉冲噪声检测阶段获得的二进制决策图上的1的数进行计[2]数。
基于二进制决策图,将“无过滤”应用于那些“未被破坏”的像素,而将具有自适应确定的窗口大小的SM滤波器应用于每个“损坏”像素
B.过滤算法的改进
与NASM的过滤阶段相比,如下所述,进一步提高性能有三个变化(易于识别)。
图6中去噪图像“Lena”,“Peppers”和“Baboon”(具有80%的脉冲噪声密度)的结果。 通过使用理想的开关滤波器(第一列),分别使用BDND(第二列)和NASM滤波器(第三列)提出的开关中值滤波器。
首先,为了避免在高噪声密度情况(即,)下图像细节的严重模糊,最大窗口尺寸被限制为7 7(而不是如[9]中所建议的11 11))。之后,滤波器的窗口尺寸以与[9]中提出的类似的方式获得,稍作修改如下。
在NASM [9]中,首先,滤波窗口在窗口的所有四边向外迭代地向外延伸一个像素,前提是未被破坏的像素的数量(除以注释)小于总数的一半在过滤窗口内的像素(取消注释),而。在这项工作中,进一步强化了一个附加条件,使得当未破坏的像素的数量等于零时,滤波窗口也将被扩展。因此,改进的第二个改变就是这样(和)或窗口将在窗口的所有四边向外延伸一个像素。
通过利用具有噪声像素的窗口大小的SM滤波器,输出像素为
在[9]中,当前像素包含在过滤(排名)过程中。请注意,当前像素已经被识别为“已损坏”,因此,我们提出的BDND中的第三个变化是排除滤波过程中的当前像素;也就是说,只有窗口中的那些“未被破坏”的像素被考虑用于排名过程。这将反过来产生更好的过滤结果,具有较少的失真。
使用理想的开关滤波器的PSNR性能比较,所提出的带有BDND的开关中值滤波器和NASM滤波器(a)“莉娜”;(b)“辣椒”;(c)“狒狒”被各种噪音密度破坏。
C.彩色图像去噪
可以将切换中值滤波方案扩展到通过标量中值滤波去噪损坏的彩色图像方法以及向量中值滤波方法。该标量法将每个颜色组件视为独立的实体;也就是说,相同的过滤方案将应用于R-,G和B平面,就好像每个平面是一
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[26914],资料为PDF文档或Word文档,PDF文档可免费转换为Word

