
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
2014年6月29日至7月4日,中国沉阳第十一届智能控制与自动化世界大会的进展情况
基于PCA-SIFT的交通标志识别
高宏伟 刘传 寅于洋
中国科学院沉阳自动化研究所机器人国家重点实验室
- 沉阳理工大学信息科学与工程学院
李斌
中国科学院沉阳自动化研究所机器人国家重点实验室
摘要:本文研究了交通标志自动识别。首先介绍了交通标志图像预处理方法。其次,阐述了基于SIFT的交通标志特征提取算法,提出了一种基于PCA降维的快速SIFT算法,以提取交通标 志的特征。最后,研究了SVM分类器。完成了大量的实验结果, 以证明相关算法的有效性和实用性。
关键词:交通标志;SIFT;PCA-SIFT;承认
一.介绍
随着智能交通系统的发展和研究,自动TSR(交通标志 识别,TSR)引起了人们的关注,技术得到了很大的提高。在不远的将来,TSR系统将成为无人驾驶车辆系统的重要 组成部分。
在TSR的研究中,识别的影响因素包括:交通标志容易受到外部环境的影响;交通标志容易褪色和变形,捕获的图像容易扭曲;在无人驾驶车辆的移动过程中可能产生振动,因此收集的图像将非常模糊;而不同的拍摄天使也会导致图像的几何失真,有些甚至可能更严重。由于上述几个方面的存在,在自然环境中收集的图像中存在不确定性和模糊性;这增加了TSR系统设计的难度,也给设计师带来了更多的挑战。
日本于1987年首次进行了自动TSR研究,主要针对速度交通标志。该系统中使用的经典算法包括:阈值分割,模板匹配和边缘检测。可以在0.5秒内处理速度交通标志照片,但未发布图像识别率。
1992年,法国的圣布兰卡开发了一种用于识别红色标志的交通标志识别系统。使用的算法包含颜色过滤和边缘检测。在特征提取和目标分类过程中使用专家系统和神经
识别系统,技术越来越完善和成熟,并提出了越来越多的理论。2000年,日本大阪大学开发了一种用于实时交通标志识别的主动视觉系统。使用两个相机来收集图像,并且在识别过程中使用模板匹配方法。使用17个交通指示标志和71个速度交通标志来测试该系统。结果为:100%和97.2% [3] 。
2001年,威斯康星大学的刘和冉开发了一个系统,该系统使用HIS颜色空间分割方法来识别停止标志。采用神经网络方法对540个交通标志图像进行分类识别,识别率达到95%。
在中国,智能交通系统的发展起步较晚,自动识别交 通标志很困难,因此仍然很少有成熟的实用TSR系统。随 着智能交通系统的快速发展和国家对智能交通系统的重视, 一些研究机构和大学开展了相关研究,如清华大学,国防 科技大学,南京理工大学等。
ZS Dong使用神经网络作为分类器完成了显着的交通标志粗略和精细分类。提出了一种基于BP神经网络的三角形 识别方法。对小规模测试样品的测试表明该方法具有更好 的稳健性。然而,在实验中只选择了一小部分训练集样本。未选择复杂自然环境中的大量交通标志作为训练集 [4]。
2010年,K.Zhang等人。提出了一种基于投影中心形状特征的交通标志识别方法。根据颜色信息对动态图像进行分割,得到目标区域的图像。接下来,提取内核图像, 然后通过中心投影变换计算来计算形状特征。最后,将提取的特征作为概率神经网络的输入向量进行训练和测试。该方法具有操作简单,易于理解,可靠性好的优点。但是速度是通过神经网络的输入向量的维度来评分的。效率不
网络识别方法。该系统在PCA计算机上运行,平均图像识别率达到94.9% 。.
高噪音很大环境
。
二十一世纪,越来越多的高校也开始研究自动交通标
志
本文对以往的研究成果进行了总结,并提出了一种基
于GIS的交通标志识别算法
978-1-4799-5825-2/14/$31.00 copy;2014 IEEE 5070
提出了PCA-SIFT算法。该算法主要可分为三个部分:图像预处理,特征提取,分类器。在特征提取部分,传统SIFT算。降维快速SIFT快速提取交通标志。实验结果表明,改进算法花费的描述符要短得多,与传统算法相比,生成时间短。
众所周知。直方图均衡处理是基于累积分布函数变换方法的直方图修改方法。假设传递函数是:
s T (r) r p (w)dw (1)
r
其中w是积分变量,
P(w)dw是累积变量
r的分布函数,并且单调递增。区间[0,1],(2) - (4)
二.交通标志的预处理
由于图像清晰,所收集的交通标志很容易受到自然环境干扰的影响,
中的T(r)单调增加可以通过导数(1)获得:
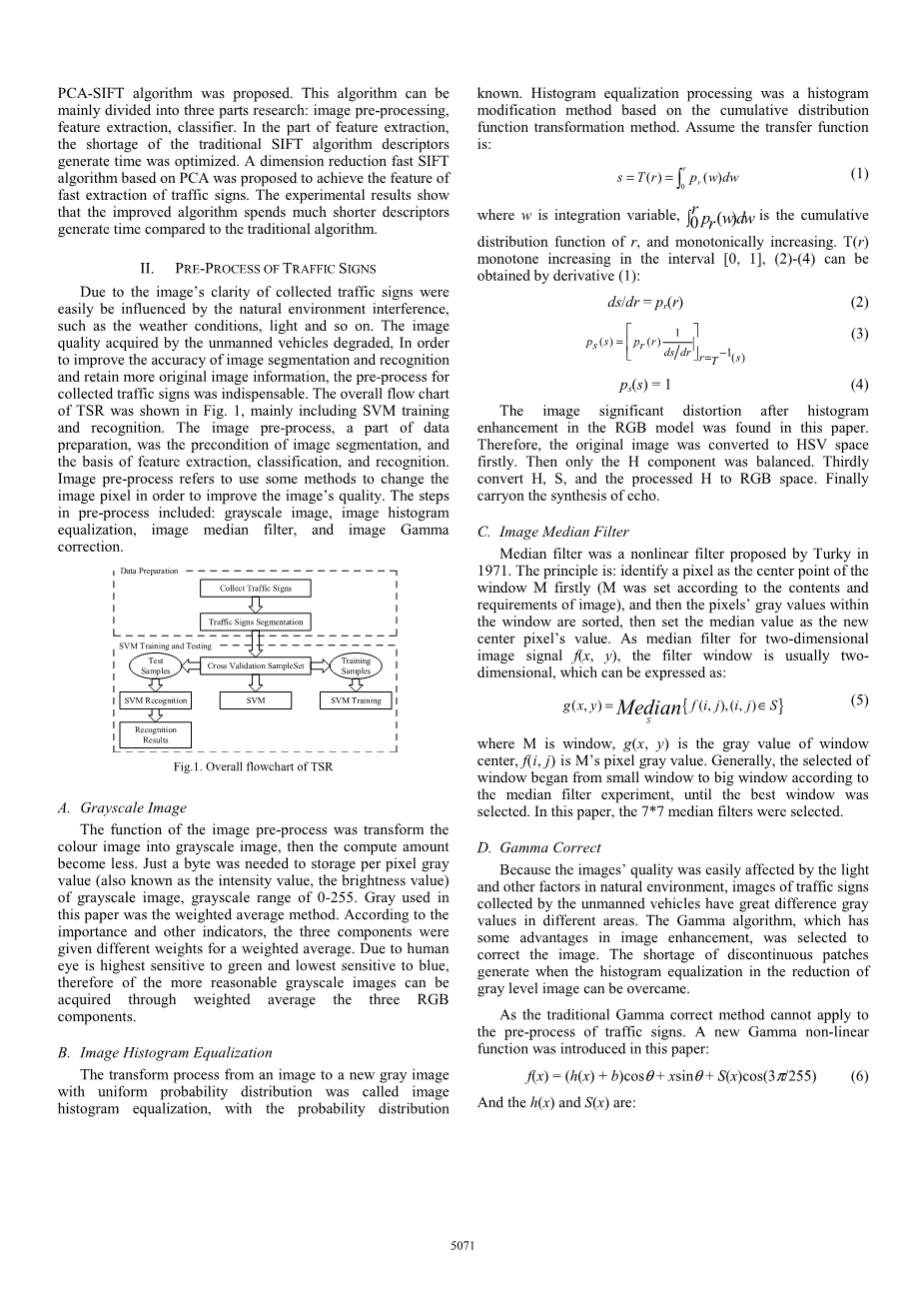
如天气状况,光线等。无人驾驶车辆获取的图像质量下降, 以提高图像分割和识别的准确性并保留更多的原始图像信息,收集的交通标志的预处理是必不可少的。TSR的总体流程图如图1所示,主要包括SVM 训练和识别。图像预处理是数据准备的一部分,是图像分割的前提,是特征提取,分类和识别的基础。图像预处理是指使用一些方法来改变图像像素以提高图像的质量。预处理中的步骤包括:灰度图像,图像直方图均衡,图像中值滤波和图像伽玛校正。
1
ps (s) pr (r)
ds dr
r T
1(s)
(3
ps(s) = 1 (4)
数据准备
SVM培训和测试
测试样品
培训样
本
识别结果
SVM培训
SVM
SVM识别
交叉验证SampleSet
交通标志分割
收集交通标志
本文发现RGB模型中直方图增强后的图像显着失真。因 此,首先将原始图像转换为HSV空间。然后只有H组分平衡。第三,将H,S和处理后的H转换为RGB空间。最后进行回声 的合成。
图像中值滤波器
中位滤波器是Turky在1971年提出的非线性滤波器。原理是:首先将像素识别为窗口M的中心点(M根据图像的内容和要求设置),然后是像素的灰度值对窗口进行排序, 然后将中值设置为新的中心像素值。作为二维图像信号f
(x,y)的中值滤波器,滤波器窗口通常是二维的,可表示为:
g(x, y) Median f (i, j), (i, j) S
S
(5)
灰度图像
图.1.SR的总体流程
其中M是窗口,g(x,y)是窗口中心的灰度值,f(i,j) 是M的像素灰度值。通常,根据中值滤波器实验,所选窗 口从小窗口开始到大窗口,直到选择最佳窗口。在本文中, 选择了7 * 7中值滤波器。
图像预处理的功能是将彩色图像转换为灰度图像,然 后计算量变小。只需一个字节就可以存储灰度图像的每像 素灰度值(也称为强度值,亮度值),灰度范围为0-255。本文使用的灰色是加权平均法。根据重要性和其他指标, 三个组成部分的加权平均值被赋予不同的权重。由于人眼 对绿色最敏感且对蓝色最敏感,因此可以通过加权平均三 个RGB分量获得更合理的灰度图像。
图像直方图均衡
从图像到具有均匀概率分布的新灰度图像的变换过程被称为图像直方图均衡,具有概率分布
伽玛正确
由于图像的质量很容易受到自然环境中光线和其他因素的影响,因此无人驾驶车辆收集的交通标志图像在不同区域的灰度值差异很大。选择具有图像增强优势的Gamma 算法来校正图像。当灰度图像缩小中的直方图均衡可以克服时,产生不连续斑块的不足。
由于传统的Gamma校正方法不能适用于交通标志的预处理。本文介绍了一种新的Gamma非线性函数:
f (x) = (h (x) b) cos xsin S(x)cos(3 /255)
(6)而h(x)和S(x)是:
h (x) = sin(a (xxm)/255) (7)
c x x x x
x m m (8)
表示两个相邻尺度空间函数的差值,如(11)所示:
D(x,y,)=(G(x,y,k)-G(x,y,))I(x,y)=L(x,y,k)-L(x,y,) (11)
S x m
c
图像金字塔的形成:通过从上组图像中取样来获得下一
x x x x
m m
xm
其中 arctan(-b / xm),rho;是h(x)的幅度,f(x) 的最大范围由b确定,高灰区,低灰区的范围和通过改变 alpha;的值可以在一定程度上调整过渡区。该
=
值设定为alpha;= 1.5,rho;= 0.06,b = 0.5。
三.传统的筛选算法
SIFT特征提取 的过程主要包括:
组图像。该通过高斯金字塔中两个相邻尺度空间函数之间的差计算可以获得DOG金字塔,如图3所示。
Scacl
e二阶
cacl
e第一个
二阶 k6 k5 k4 k3 k2
第一
个订
单
首先,极端点检测和关键点提取
在尺度空间图像中,每个关键点的特征信息计算:位置, 比例和方向;其次,关键点周围的图像区域,块内梯度的直方图计算,描述符特征
k4 k3
矢量生成的关键点。在本节中,我们将重点介绍SIFT算法, 以及从关键点到描述符特征向量生成的步骤。
规模空间的构建
Koenderink指出高斯卷积核是唯一实现规模变换的变换核。Lindeberg证明高斯内核是唯一的线性内核。如果二维图像G(x,y)比例空间定义为:
L(x,y,R) = G(x,y,R) I(x,y) (9)
其中G(x,y,R)是具有可变比例的高斯函数:
图2.高斯金字塔 如图3所示.DOG金字塔
检测局部极值
尺度空间理论的主要思想是通过原始图像的尺度变换 获取多尺度空间中的图像表示序列,在尺度空间下对序列 进行主要轮廓提取,并将轮廓设置为特征。矢量以实现对 角点,点和边缘的检测,或对不同分辨率的特征提取 [12]。在尺度空间中,每个尺度图像的模糊度变得更大,这可以 模仿人类在视网膜中从近到远的物体的距离。
G x, y, R 1 ex2 y2 2 R2
2pr2
形成过程。高斯卷积核是尺度空间图像信息的唯一线性变
(10) 换核实现。假设G(x,y,sigma;)是具有变量的高斯
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18187],资料为PDF文档或Word文档,PDF文档可免费转换为Word

