
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
制造工程的最新进展
仓库自动堆垛机的设计与控制
Jozef Dorner,Michal Blaho
控制与工业信息学研究所 电气工程与信息技术学院 斯洛克理工大学
斯洛伐克共和国jozef.dorner@stuba.sk,michal.blaho@stuba.sk
摘要:介绍了仓库堆垛机控制系统的应用与实现,该系统是一个真实的仓库系统模型。该控制由一个可编程逻辑控制器(PLC)系统实现,该系统控制EPOS 24/5(易于使用的定位系统)单元。PLC系统和EPOS单元之间的通信由工业CAN(控制器局域网)总线提供。堆垛机控制的这个解决方案可以作为一个实际仓库的类似解决方案的说明。该解决方案将应用于对PLC系统和工业CAN总线感兴趣的学生的教育。
关键词:控制、仓库堆垛机、CAN总线、PLC系统、WEB技术
1引言
物流和物流材料以及信息流代表了最佳成本和收入比的实现。这一比例是通过优化各个后勤行动来实现的。对物料和仓库的操作是非常重要的物流成本项目。【14,11】仓库自动化的一部分是堆垛机系统。堆垛机是起重设备,用于自动存储托盘。这些设备在PC、PLC系统或其他可编程系统中使用控制软件操作。堆垛机可在自动、半自动或手动模式下工作。堆垛机的功能模型将用于在教育过程中展示这些系统中的控制和通信。堆垛机模型还将用于模拟控制优化和创建物流中的自动操作。
2问题表述
开发和实现的主要目标是控制仓库堆垛机在三维坐标系中的运动物理模型。采用西门子公司生产的PLC系统进行控制。实现了堆垛机与控制系统的通信,通过工业CAN网络和通信PLC模块,以及CAN 300 Pro。[4]直流电机运行的EPOS控制单元用于控制子系统性能,该子系统由三个直流电机和传感器组成。两个实时摄像头监控整个系统。还设计了一个利用互联网和网络技术进行远程系统控制的接口。
2.1控制子系统
控制子系统由一些实现控制算法的技术设备组成。上控制级由西门子公司生产的PLC系统Simatic S7-300实现。下控制级由两个用于垂直和水平移动的EPOS 24/5控制单元组成,由Maxon电机制造[7,8]沿第三轴(推入、推出)的移动控制由ST Microelectronic制造的IO电路H-桥型L298实现。
2.2通信子系统
通信子系统由三部分组成:通信PLC模块CAN 300 Pro、工业CAN总线和PROFINET IO(输入/输出)总线。通信模块、PLC和POS控制单元之间的连接由CAN总线提供。PROFINET IO提供PLC系统和OPC(用于过程控制的OLE)服务器之间的连接。
2.3性能子系统
性能子系统由三台直流电机实现,用于沿三轴运动。两台带有行星齿轮GP26B和增量编码器的REMAX 29直流电机用于水平和垂直移动。对于第三个方向的运动(推入、推出),使用一个简单的直流电机,并配备适当的电源。
2.4传感器子系统
该子系统由增量编码器和终端传感器组成。增量编码器读取堆垛机的实际位置。末端传感器用于寻找零点、原点和终点位置。推入/推出机构具有碰撞传感器。此外,碰撞是通过测量输出H桥L298电路上的电压来检测的。
3问题解决方案
3.1 PLC系统
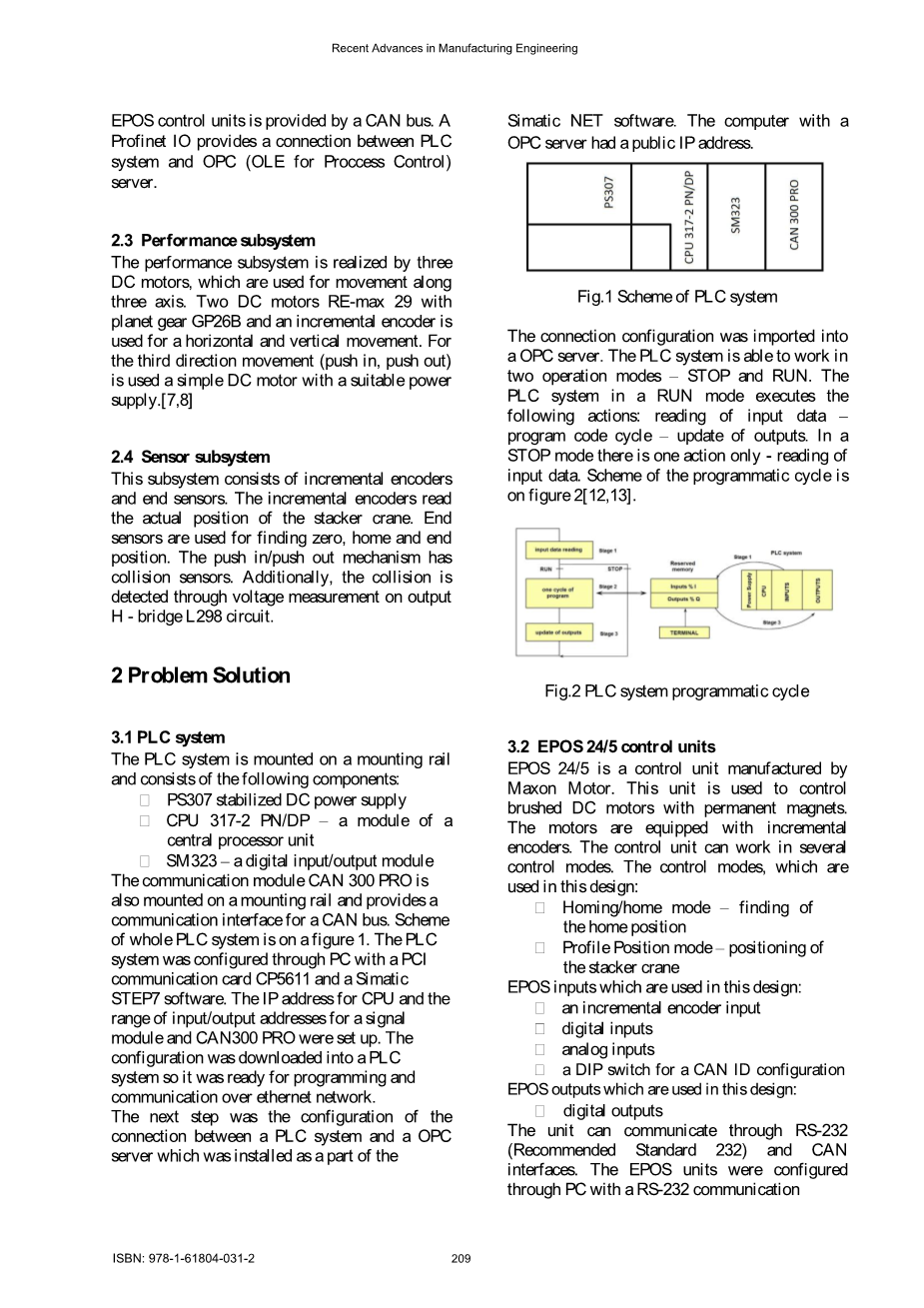
PLC系统安装在安装轨道上,由以下部件组成:
bull;PS307稳定直流电源
bull;CPU 317-2 PN/DP–中央处理器单元的一个模块
bull;SM323–数字输入/输出模块通信模块CAN 300 Pro也安装在安装轨道上,并为CAN总线提供通信接口。整个PLC系统方案如图1所示。PLC系统通过PC机配置,配置有PCI通信卡CP5611和SIMATIC STEP7软件。设置了CPU的IP地址和信号模块和CAN300 Pro的输入/输出地址范围。配置被下载到一个PLC系统中,因此它可以通过以太网进行编程和通信。下一步是配置PLC系统与作为SIMATIC网络软件一部分安装的OPC服务器之间的连接。带有OPC服务器的计算机有一个公共IP地址。
图1 PLC系统方案
连接配置已导入到OPC服务器。PLC系统可以在两种操作模式下工作-停止和运行。运行模式下的PLC系统执行以下操作:读取输入数据-程序代码循环-更新输出。在停止模式下,只有一个操作-读取输入数据。方案循环方案如图2所示[12,13]。
图2 PLC系统编程周期
3.2 EPOS 24/5控制单元
EPOS 24/5是由Maxon Motor制造的控制单元。该装置用于用永磁体控制刷直流电机。电机配有增量编码器。控制单元可以在多种控制模式下工作。本设计中使用的控制模式:
bull;原点/原点模式–查找原点位置
bull;外形位置模式-堆垛机的定位
本设计中使用的EPOS输入:
bull;增量编码器输入
bull;数字输入
bull;模拟输入
bull;本设计中使用的用于CAN ID配置EPOS输出的DIP开关:
bull;数字输出
装置可通过RS-232(推荐标准232)和CAN接口进行通信。EPOS装置通过PC机配置,采用RS-232通信。界面和EPOS用户界面软件。建立了速度、电流PI控制器和位置PID控制器。末端位置传感器和主传感器连接到EPOS数字输入。EPOS模拟输入从H桥(L298)输出读取电压。该模拟输入对于控制沿第三轴的运动(推入、推出)很重要。
3.3系统中的通信和通信接口
3.3.1 CAN总线和CANopen协议
控制器局域网(CAN)是博世公司1986年引进的一种串行总线。最初,CAN总线用于汽车工业,用于汽车传感器和控制单元之间的通信。不久之后,CAN总线的使用扩展到了工业自动化领域。1992年成立了罐头用户和制造商协会。它被称为CIA(自动化中的CAN)。1995年,中情局发布了一个CANopen协议的规范,该协议也将用于当前的仓库系统。CAN协议允许来自不同节点的同时总线访问。CAN中采用的总线访问方法是非破坏性的位仲裁,称为载波侦听多址访问,具有冲突检测和消息优先级仲裁(CSMA/CD AMP)。消息优先级在CAN标识符中解码。本设计中使用的EPOS单元仅与11位标识符帧(CAN2.0A)兼容。[2,3]
3.3.2 EPOS单元的通信架构
EPOS单元与通信模块之间的通信为主从通信类型,其中CAN 300 Pro模块为主从通信,EPOS单元为从通信。EPOS单元的通信体系结构如图3所示。整个通信子系统的方案如图4所示。
3.3.3配置和通信
这是实现了配置每一个CAN 300 canparam V4软件通过USB接口和thecia ds402能根据手册的标准。每个模块的CAN 300是一个史诗单位是主人和奴隶。根据《CANopen协议规范(过程数据对象),PDO和SDO(服务数据对象)是用于此应用程序。PDO是一个用于实时数据传输。SDO用于从EPOS单元的对象字典中读取和写入对象。PDO直接映射在CAN 300 Pro模块和EPOS单元中。通过对象字典中的索引和子索引定义,FB(功能块)可以访问SDO。[ [ 17 ]。
图3 EPOS单元的通信结构
图4通信子系统方案
3.3.4 CAN总线接线
通信模块与水平EPOS单元之间的连接采用COM–CAN电缆。两个EPOS单元之间的连接使用CAN-CAN电缆实现。模块CAN 300 Pro的侧面有一个终端电阻,直接集成到电缆接头中。在垂直EPOS装置的一侧有一个CAN端接插头。CAN总线的连接如图5所示[16,17]
3.4堆垛机的控制
为堆料机控制开发了一个程序,除了控制之外,该程序还通过操作员控制台创建了一个用于远程控制的API接口。这个API接口由内存位组成,在内存位上绑定某些操作。这些内存位由OPC服务器启用,因此可以远程读取和设置。PLC中的程序由对象组成。对象字典是canopen设备的重要组成部分之一。整个设备由本字典中的对象控制。字典是由对象组创建的,我们可以通过网络(CAN总线)访问这些对象组。每个对象都由一个16位索引和一个8位子索引寻址。为了说明,16位索引处理整个结构,然后8位子索引处理该结构中的元素。[12,13]对象类型:
bull;OB组织块,主程序周期在其中运行
bull;与Pascal中的过程类似的FB功能块,包含绑定到特定数据块的I/O参数。
bull;fc函数,类似于fb,但能够返回值
bull;数据库数据块
bull;UDT数据类型
bull;增值税变量表
图5 CAN总线连接
3.4.1操作模式
为了控制堆垛机,采用了两种模式:归位模式和轮廓位置模式。两者都使用轨迹生成器,该生成器使用输入数据计算轨迹并设置移动轮廓。因此,控制进入循环,程序在循环中验证所需位置的实现。图6中有一个功能块方案。
归位模式用于将堆垛机置于零位置。我们可以通过使用PDO对象的参数来激活它。这些设置由SDO对象发送到EPOSES。
轮廓位置模式用于将堆垛机移动到所需位置。我们可以通过设置PDO对象来激活它。此模式也使用轨迹生成器。对生成器的输入是以下参数,我们使用SDO对象设置这些参数。16,17,8]
图6功能块方案
3.4.2堆垛机移动
仓库模型由6个水平位置和5个垂直位置组成。为了在两个位置之间移动堆垛机,必须激活配置文件位置模式。之后,特别是水平和垂直移动时,设置正确的位置。我们使用PDO对象设置位置“所需位置”。我们总是设置绝对位置,也就是说,所需的位置由从零位置开始的几步来表示。触发激活后,堆垛机移动到所需位置。图6为堆垛机EAL模型,图7为带滑动机构的电梯结构。触发激活后,程序检查堆垛机位置并将其与所需位置进行比较。然后它向EPOS单元发送命令。轨道的弹出和插入也由EOPS装置控制。通过读取和评估IO L298输出的电压值,实现轨道位置控制。
图6实际堆垛机模型
图7带滑动机构模型的电梯结构
3.5使用Web技术进行管理和管理
该设计的主要目标是为自动化存储管理创建客户机-服务器应用程序和通信接口。创建了一个本地操作员控制台,以在WinCC环境中提供机器人堆垛机的控制和管理。利用Web技术,设计了一个客户端-服务器应用程序,实现了对多个用户的堆垛机活动的管理和监控,保证了不同角色的用户管理授权、统计评估数据导出和存档数据。
图8是整个应用程序的简化图。
Web应用程序处理两种通信类型:
在服务器上具有分布式数据库的客户机PC,
客户机-服务器通信。
Web应用程序提供了整个管理过程的图形可视化。整个Web应用程序使用基于客户机-服务器体系结构的Web技术,通过所提议的带有分布式数据库的过程进行远程控制。
客户端(PC-Web客户端),在成功登录系统(带名称和密码)后,能够管理工艺流程,实时监控管理进度,通过可视化方式跟踪管理结果,还可以从网络摄像机传输视频。在操作员控制台方面,解决了与OPC服务器和操作员控制台的通信、对服务器上数据库的数据处理以及与工艺流程和操作员控制台的双向通信。
图8:拟议应用的架构
结论
我们设计并实现了一个真正的仓库管理模型与自动堆垛机。我们为PLC系统创建了一个管理程序。设计并实现了PLC与OPC服务器之间的通信,以及PLC系统与控制单元之间通过CAN总线EPOS进行的通信。我们验证了所提出的解决方案的功能。通过创建一个操作员控制台和一个用于管理整个模型的Web应用程序,我们为物流操作中建模方法的开发、优化、管理和自动化生成创造了空间。因为我们使用了一个真正的小型化管理系统和一个堆垛机,所以有可能在一个真正的工业模型中验证这些方法。这个项目代表了一个有价值的贡献,也是为了自动化领域的教育目的。
确认
根据合同号1/0592/10,这项工作得到了Vega机构的支持。
参考文献:
- Yadav, S. C. a Singh, , S. K. An Introduction to CLIENT/SERVER. New Delhi : New
Age International (P) Ltd., Publishers, 2009. 978-81-224-2861-2.
- CiA. CAN Physical Layer [pdf]. Erlangen : CiA, 1999. [cit. 2011.12.05].
- CiA. CAN Data Link Layer [pdf]. Erlangen : CiA, 1999. [cit. 2011.12.05].
- CiA. CANopen Application layer and communication profile [pdf]. Erlangen : CiA, 2007. [cit. 2011.12.05].
- LAMBERT, Douglas M. – STOCK, James R.
– ELLRAM, Lisa M. Logistika. 1. vyd. Praha : Compute
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18197],资料为PDF文档或Word文档,PDF文档可免费转换为Word

