英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
外文文献翻译
题 目 传统与高阶滑模控制问题的探讨与研究
传统与高阶滑模控制问题的探讨与研究
古扎丽努尔·依明
南京信息工程大学自动化学院,江苏 南京 210044
摘要: 本技术论文中我们讨论了高阶滑模控制在何种程度上可以替代传统的滑模控制问题。首先我们给出了传统与高阶滑模控制原理以及滑模控制的发展概况。在此基础上,设计有限时间收敛系统的滑模控制器,使其在保持传统滑模控制的强鲁棒性的同时,讨论一类不确定系统的稳定性因素,观察系统的抖振效应,通过仿真和几个具体实际例子的研究,证明提出的滑模控制理论的有效性和优越性。然后借助A. Levant教授提出的高阶滑动模式(HOSM)概念,使其作为传统滑动模式的替代方案,消除相对于传统滑模的相对度等于1的要求,从此来实现减弱抖振现象的影响。借仿真和实际例子,验证系统具有很好的鲁棒性能,能够替代传统滑模控制。最后通过比较传统和高阶滑模控制方法,讨论高阶滑模控制多大程度上能代替传统滑模控制的问题。滑模阶数的确定、相对度、颤振衰减、颤振变化以及实现复杂性构成了本论文讨论的范围。
关键词:滑模控制;抖动抑制;相对度;稳定性;有限时间收敛;
- 引言
自从A. Levant博士发起了高阶滑动模式(HOSM)概念[1],该地区出版物的流量一直保持在较高水平。这个概念产生了一系列的数学问题,因此,莫雷诺[2],波兹尼亚克和波利亚科夫[3]、[4],奥尔洛夫[5],巴托利尼和费拉拉[6]出版了一套优秀的出版物。当然关于如何解决这些问题,Levant [7]博士有很不错的想法。在本技术论文中,我们并不从数学家的角度出发,而是从控制工程师的角度来讨论HOSM的设计问题。
提供HOSM作为传统滑动模式的替代方案(该术语在[8]中用于一阶滑动模式)。根据作者的意见,HOSM可以删除相对于传统滑模的相对度等于1的要求,并减弱抖振现象的影响。通过比较传统和高阶滑模控制方法来讨论这两个问题。
- 相对阶和定义
我们开始与三阶系统中的传统滑模控制进行比较 - 这是20世纪60年代早期的一个例子
(1)
由于S的时间导数是不连续的,因此,传统的滑动模式可以用以下定义的所需特性来实施:微分方程S = 0当然,控制用
(2)
与(1)相同。
函数S可以选择不同的形式,以便在子空间(s,s)中具有期望的运动:收敛速度、最优性、有限收敛时间等。再次,S的时间导数是不连续的,滑模可以称为常规。特别地,如果[9]发生有限收敛时间。
(3)
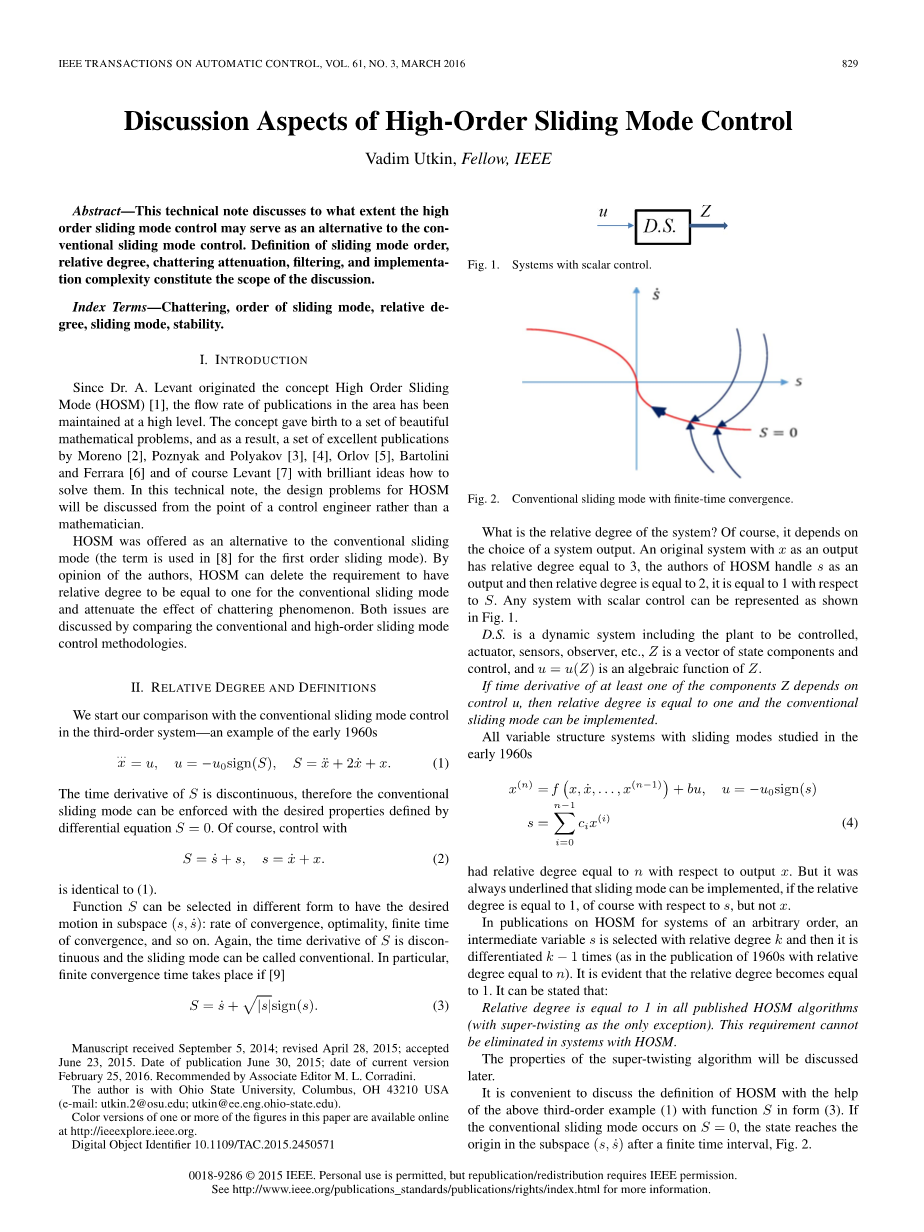
图1.具有标量控制的系统
图2.具有有限时间收敛的传统滑模
系统的相对程度是多少?当然,这取决于系统输出的选择。以x为输出的原始系统的相对度等于3,HOSM的作者将S作为输出处理,然后相对度等于2,相对于S等于1。任何具有标量控制的系统都可以如图1所示。
DS是一个动态系统,包括待控制的工厂,执行器,传感器, 观察器等,Z是状态分量和控制的矢量,u = u(Z)是Z的代数函数。
如果组分Z中的至少一个的时间导数取决于控制u,则相对度等于1,可以实现传统的滑动模式。20世纪60年代早期研究了所有具有滑模的变结构系统。
(4)
相对于输出x,相对度等于n,但始终保持滑动的模态实现,如果相对度等于1,当然,对于S,而不是x。
在关于任意阶的系统的HOSM的出版物中,选择具有相对度k的中间变量s,然后将其区分k 1次(如1960年代的出版物中,相对度等于n)。很明显,相对程度等于1。可以说:
超扭曲算法的性质将在后面讨论。借助上述三阶实例(1),用函数S形式(3)讨论HOMM的解是方便的。如果传统滑动模式发生在S=0上,则在有限时间间隔之后在状态子空间(s,srsquo;)到达原点,如图2所示。
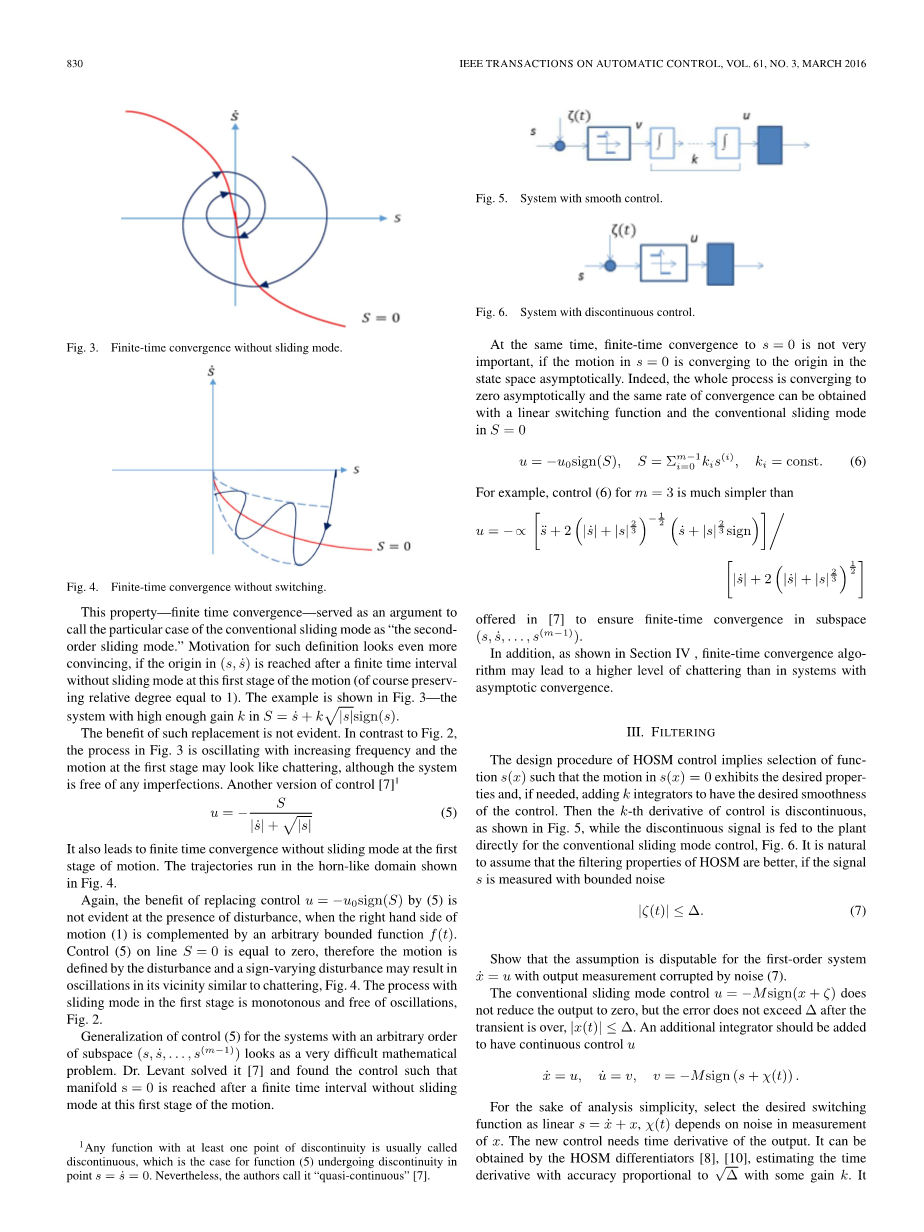
图3. 无滑动模式的有限时间收敛
图4. 无切换的有限时间收敛
这个性质——时间收敛——可以作为一个论据,把传统滑动模型的特殊性称为“第二滑动模式”。如果在运动的第一阶段(当然保持相对度等于1)没有滑动模式的情况下,有限时间间隔之后达到()的原点,则这种消除的动机看起来更加令人信服。该示例如图3所示,具有足够高的增益k的系统
这种置换的不明显。 与图2相反,图3中的过程随着频率的增加而振荡,并且第一阶段的运动可能看起来像抖动,尽管系统没有任何缺陷。另一种版本的控制 [7]1
(5)
它还导致在运动的第一阶段没有滑动模式的有限时间收敛。轨迹在图4中所示的喇叭状区域中运行。同样,当运动的右侧(1)由任意有界函数f(t)补充时,在存在扰动时将控制替换为(5)的益处不明显。线S = 0上的控制(5)等于零,因此运动由扰动定义,并且可能导致符号变化扰动。附近的振荡类似于抖动,图4第一阶段滑动模式的过程是单调的,没有振荡,如图2所示。
具有任意子空间(s, s˙, ..., s(mminus;1))的系统的控制(5)的推广看起来是一个非常困难的数学问题。Levant博士解决了这个问题[7]并找到了控制方法,在运动的第一阶段,没有滑动模式的有限时间间隔之后达到流形s = 0。
图5.光滑控制的系统
图6.具有不连续控制的系统
同时,如果s = 0中的运动渐近收敛到状态空间中的原点,则s = 0的有限时间收敛不是很重要。实际上,整个过程渐近收敛到零,并且利用线性切换函数和S = 0的传统滑动模式可以获得相同的收敛速度。
(6)
例如,m = 3的控制(6)比下面控制简单得多,
在[7]中提出,以确保子空间中的有限时间收敛( )。此外,如第IV节所示,有限时间收敛算法可能导致更高的抖动水平,而不是系统渐近收敛。
- 滤波
HOSM控制的设计过程意味着选择函数s(x),使得s(x)= 0中的运动表现出所需的适当关系,并且如果需要,添加k个积分器以具有所需的平滑度控制。然后控制的第k个导数是不连续的,如图5所示,当不连续信号被送入工厂时直接用于传统的滑模控制,如图6所示。如果信号是用有界噪声测量s,这很自然假设HOSM的过滤属性更好。
(7)
表明该假设对于一阶系统是有争议的,输出测量被噪声破坏(7)。
传统的滑动模式控制不要将输出降低到零,但误差不超过Delta;后瞬态结束,。 应添加一个额外的积分器来连续控制u
为简化分析,请选择所需的切换函数为线性取决于测量中的噪声x。 新的控制需要输出函数的时间导数。它可以通过HOSM微分器[8]和[10]获得,估计精度与Delta;成比例的时间导数,增益为k。
图7. HOSM系统中的抖动
这意味着对于chi;(t)最大程度的估计等同于,和之后有限时间间隔,或者
(8)
对于(8)的解的上估计值小于等于Delta;的传统滑动模式控制的上估计值是不明显的。例如,假设输出传感器的增益偏离标称值alpha;,则,如[8]所假设的,可以得到x的理想时间导数,因此,在滑动模式出现后和,因此确认上部估计与传统滑动模式控制的估计值一致。
在s中用替换x, 代替有限时间收敛增加噪声对的小值的影响。
- 有限时间收敛和抖动
在本节中,将在有限时间收敛的背景下讨论“在具有高阶滑模控制的系统中显着减少的着名抖振效应”的陈述。控制的平稳性是支持这种说法的主要论据。
抖动的主要原因是未建模的动态以及高反馈增益或不连续控制。有限时间收敛意味着一个非李普希茨开关函数在原点具有无限的导数,相当于高增益。因此,它可以导致高水平的抖动。然后可能出现的疑问是,具有有限时间收敛的系统是否比传统滑模和渐近收敛的系统更好地降低了抖振幅度。注意,在存在抖动的情况下,术语“有限时间收敛”的含义不明确 - 收敛到什么程度?
我们的疑虑可以通过简单的一阶系统来证实,未建模动态的传递函数
(9)
二阶滑模控制是方程式(10)的一种形式
M =1的过程如图7所示。
将(10)中的函数s替换为线性函数中的c,使得两个系统中的瞬态过程都于(c = 1.2)相似,如图8所示。传统控制系统中的抖振幅度与HOSM系统相比,控制器减少了八倍。
图8.使用传统控制的系统中的抖动
该示例说明有限时间收敛与抖动抑制要求相冲突。
- 超扭曲控制
超扭曲算法被称为二阶HOSM[8]。系统x的标量控制是任何HOSM的连续时间函数,需要一个额外的积分器,图9 。
(11)
值得注意的是,尽管人工引入的不连续控制和s之间的相对程度等于2,但有限时间收敛和干扰抑制不需要输出时间导数。当然,传统的滑动模式控制比超扭曲算法更简单。最后一个是作为一个有效的工具来解决聊天问题。此外,我们还将讨论赞成这一说法的论点在多大程度上具有说服力,比较了超扭曲未建模动态和传统控制 时的颤振现象。
对于这两种情况,颤振都是由不连续控制激发的,但是,正如前面部分所讨论的,对于超扭转控制,颤振可能是由连续函数引起的。简单的第一阶系统具有插入的未建模动态的传递函数可以用作该语句的说明。
如描述函数方法所示,系统及其幅度中存在周期性解或抖动,它随着参数a的增长而显着增加。
再次,分析一阶系统具有插入的未建模动态下的行为,
(12)
用于两种形式的控制-超扭曲(11)和传统控制
(13)
对于具有控制(13)的理想系统(12)中滑动模式的存在,扰动应该是有界的,(常数)、条件应该成立。由于抖振幅度与M [11]成正比,因此随着干扰水平的增加而增加。
用于超扭控制
(14)
必要的稳定条件是类似,且随着扰动程度的增加,颤振振幅值也增大。如上所述,局部反馈也导致抖动。
首先证明了当参数a=0时,超扭控制(14)存在有界扰动时,空间原点(x,y)是不稳定的,所有轨迹都是发散的。为了满足不等式选择的值使得 对于,初始条件,因此
这些x和y的值是第二个区间的初始条件,其中且持续时间为 和
同样,可以证明,对于 和一些。这意味着状态轨迹正在发散。定理:对于系统中任何agt; 0和有界域的初始条件(14)
存在着使得,如果,则所有轨迹都是发散的。
证明的想法:研究初始条件的系统行为,并且显示存在时间使使得。该时间的状态向量用作下一次的初始条件间隔进一步增加等。因此,可以得出轨迹是发散的。
这意味着增益a应趋于无穷大,干扰趋于无穷大,因此导致增加抖振幅度。对于具有两个振动源的超扭转控制的系统的高干扰值,其幅度并不明显低于传统控制的幅度。对于常规控制,扰动应该有界,而对于超扭控制,扰动的时间导数应该有界。为了比较两种控制方案,第一种方案的干扰和第二种方案的时间导数选择相等且恒定, f = F = 60。两个系统都用执行器动力学模
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18797],资料为PDF文档或Word文档,PDF文档可免费转换为Word

