
英语原文共 18 页,剩余内容已隐藏,支付完成后下载完整资料
挖掘期间盾构行为的理论模型
I:理论
光隆杉本 和 Aphichat Sramoon M.ASCE期刊
摘要:与计算机辅助自动控制系统一起开发了闭式盾构隧道方法。然而,自动控制系统基于经验关系并且没有精确的理论背景。在本文中,考虑到盾构隧道工程实践,开发了在挖掘期间作用在盾构上的理论动态载荷的模型;即挖掘区域,尾部间隙,刀具面的旋转方向,护罩的滑动,护罩顶部的地面松动以及动态平衡条件。对于砂土和粘土地面,为了定性评估模型的有效性,模拟参数对盾构行为的模拟和对盾构行为的敏感性分析,在直线和曲线对齐中进行。检查了盾构行为的结果,将其与经验和理论相比较,并且确认所提出的模型模拟相当好的盾构行为。
DOI:10.1061/(ASCE)1090-0241(2002)128:2(138)
CE数据库关键词:挖掘; 盾构; 隧道; 理论; 模拟。
介绍
背景
目前已经开发了用于在软土地中,特别是在地下水下建造隧道的盾构隧道技术,特别地已经与计算机辅助自动控制系统一起开发了闭合型盾构隧道方法。然而,这些系统是基于经验关系并且没有精确的理论背景。因此,本自动控制系统根据蛇状运动来控制盾构,以将其移回到计划的对准上,而不是减少蛇状运动。因此有时难以在复杂的地质构造中控制盾构并且预测没有案例记录的盾构行为。 为了解决这些问题,发展一种平衡负载在盾构上的理论方法,例如在挖掘期间护罩的偏离和旋转。
早期研究
基于盾构隧道工程实践,盾构行为的特性和影响盾构行为的因素如下:1护罩可以通过使用复制铣刀和铰接机构(PWRI 1992)来形成一个锋利的曲线。在挖掘区域和屏蔽蒙皮板之间的间隙,就是围绕护罩的地面位移,因此这极大地影响了盾构行为。
2由于在盾构机尾部的钢丝刷之间的油脂压力作用在盾构机尾部上的力量(Ariizumi et al.1999) 此外,有时在尖锐的曲线处损坏,因为盾构机尾部的内部接触段,尾部处的护罩接收到来自由尾部间隙限定段的力。
3当千斤顶转速增加时,千斤顶推力和刀具扭矩也增加(例如,Matsumoto等人 1989; 马歇尔 et al. 1996) 因此,盾构行为是一个动态问题。
4对于多面(MF) 盾构,盾构的偏转通过选择刀面改变(CF) 旋转方向(Matsumoto et al. 1989),以及CF的旋转方向影响盾的俯仰和偏航(Nomoto et al. 1999) 这些是指CF的旋转方向影响盾构行为,特别是偏航盾构。
5在一条尖锐的曲线上,盾构轴稍微从屏蔽隧道排列向隧道的凹面(Tomizawa 1988)水平移动,所以屏蔽轴在垂直平面上不与隧道排列一致(Matsushita et al. 1994) 因此,盾构件在水平和垂直方向上滑动,因此盾构轴方向应该被认为独立于隧道对准。
6地面的局部倒塌有时发生在盾构面的冠部,特别是在沙地中(e.g.,
TEPCO 1985; Murayama et al. 1989; Nomoto et al. 1999.)此外,过度接地导致地面松动和围绕盾冠的大地面沉降(Hashimoto 1984)。 这些也导致作用在护罩上的土压力的释放。
作用在盾构件上的负载的模型应当至少能够表示上述现象。
盾构行为已经通过统计和理论方法进行了研究。前一种方法用于通过基于盾构姿态的变化与千斤顶力矩之间的关系统计地获得未知参数来预测和控制盾构行为。 Szecky(1966)最初提出了一种基于可用数据计算顶推推力的近似公式。清水和铃木(1992)和Shimizu et al. (1992)提出了盾构姿态变化与千斤顶力矩的关系,并根据模型试验的原位数据和测量数据对其进行了检验。 Sakai和Hoshitani(1987; 1993)提出了一种识别卡尔曼滤波技术公式中未知参数的方法,并基于原位数据对其进行检验。 Kuwahara et al.(1988)应用模糊理论来控制盾构,并将结果与实际操作相比较。从工程实践的观点来看,这些方法是有用的,因为可以基于在挖掘期间测量的数据在制剂中使用最新的未知参数来控制防护罩。然而,这些方法不能容易地预测没有病例记录的盾构行为。
后一种方法用于预测和控制盾构,基于作用在盾构件上的力和力矩的平衡条件的行为。 Akagi和Komiya(1993) 提出了一个三维(3D)有限元(FE)利用挖掘元件进行分析以模拟盾构前进并基于原位数据对其进行检查。Komiya et al. (1999) 修改了这种技术以获得更强大的解决方案。Takeda et al. (1998) 提出了一个有接触问题的有限元分析,并通过使用他们的技术模拟盾构行为。 Date et al. (1999) 提出了盾构行为的运动模型,并用它来预测挖掘期间的MF盾姿态。 这些方法不能代表盾构的所有上述现象。 此外,只有武田模型考虑到盾构机周围的地面位移,这被认为是影响盾构行为的主要因素。
目标
作者先指出地面位移围绕屏蔽层应考虑作用盾构层上的负载模型,以便相当好地表示盾构层行为(Sugimoto et al. 1991) 作者还开发了一个理论负载模型,考虑到上述的一些盾构现象,并通过对地面特性的反向分析和盾构行为的模拟验证其性能(Sugimoto 1994; 杉本和Luong 1996; Sugimoto et al. 1999) 扩展这个模型,开发作用在盾构件上的负载的模型,其可以代表所有上述盾构现象。 基于所提出的负荷模型,进行了盾构行为的模拟和模型参数对砂土和粘土地面的直线和曲线对准的盾构行为的灵敏度分析。
本文详细描述了新开发的屏蔽负载模型,并显示了盾构行为模拟和灵敏度分析结果的例子。 此外,定性讨论模型的有效性,并比较模拟经验和理论盾构行为。
图1负载作用在盾构件上的模型
图2.负载模型的配置
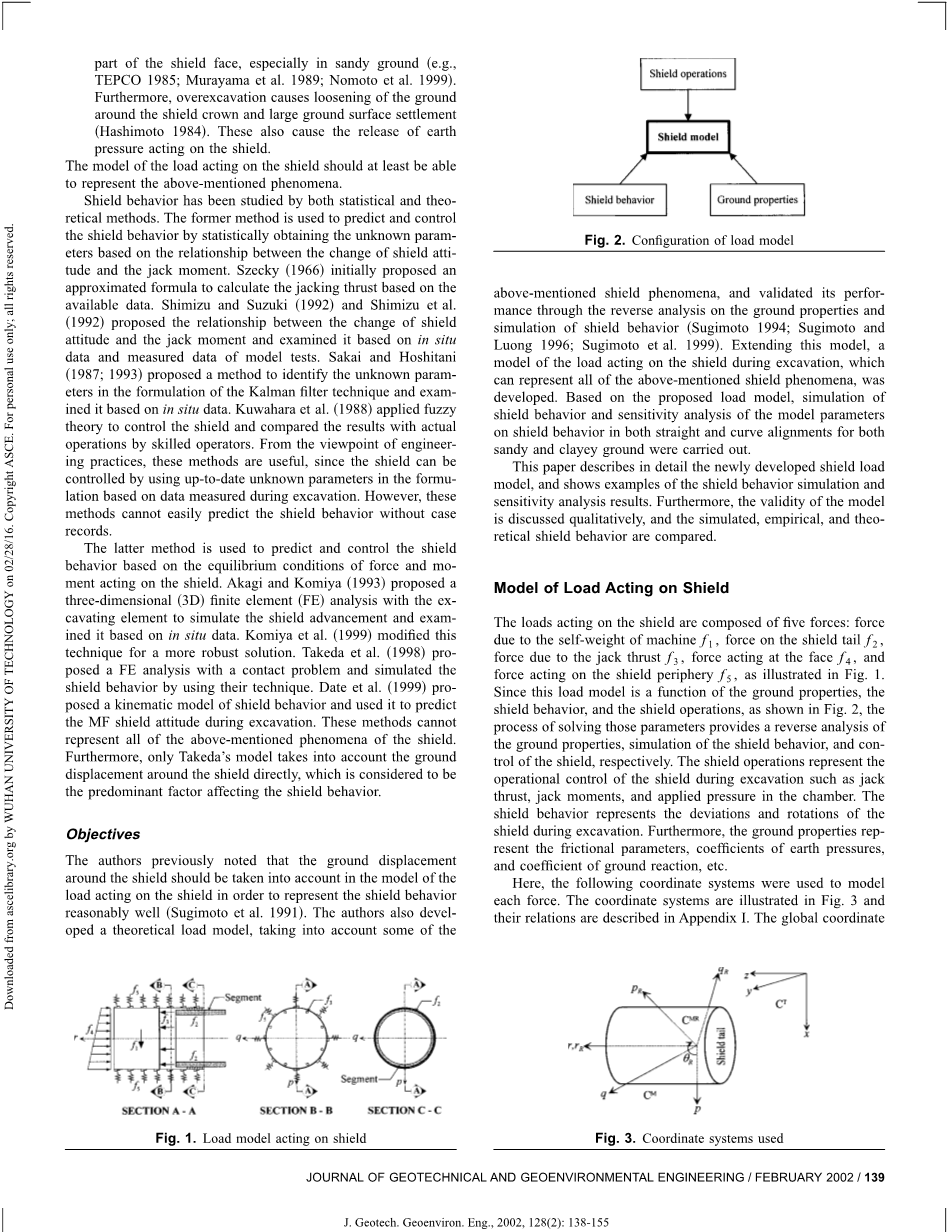
负载作用在盾构件上的模型。
作用在护罩上的载荷由五个力组成:由于机器的自重,护罩尾部上的力,由千斤顶推力产生的力,作用在面上的力, 作用在盾构件周边上的力,如图3所示。 由于该负载模型是接地特性,盾构行为和盾构操作的函数如图1所示。 如图2所示,解决这些参数的过程分别提供接地特性的反向分析,盾构行为的模拟和盾构的控制。 盾构操作代表挖掘期间盾牌的操作控制,例如千斤顶推力,千斤顶力矩和室中施加的压力。 盾牌行为表示盾牌在挖掘期间的偏差和旋转。 此外,地面性质代表摩擦参数,土压力系数和地面反应系数等。
这里,使用以下坐标系来建模每个力。 坐标系如图3所示。它们的关系在附录I中描述。选择全局坐标系,使得x轴垂直向下,y和z轴在水平面上。 选择机器坐标系,使得p轴垂直向下而屏蔽件不旋转,并且r轴在机器轴的方向上。 机械坐标系的原点被选择为千斤顶推力作用部分的中心。 除了上述两个系统之外,通过围绕r轴旋转产生的坐标系也被认为是,并且它的轴被命名为,和。
图3.使用的坐标系
下面显示力的每个分量,A点力矢量F可以通过变换矩阵变换到任何坐标表达式。 力矩矢量M可以通过取位置矢量r和力矢量的叉积获得。 注意,上标T,M和MR示出所使用的坐标系,下标1-5分别表示力 -的分量。
图4.由于作用在盾尾上的力
盾牌自重
盾牌的自重在重心的x轴方向上垂直向下作用。 然后力矢量定义为
盾牌尾翼上的力
当屏蔽件旋转直到屏蔽件尾部接触段环时,产生从段到屏蔽件的反作用力。屏蔽件的姿势变化导致屏蔽件尾部处的金属丝变形,这产生作用在盾构件尾部的不均匀压力。 此外,在各排金属刷之间施加的润滑脂压力也在盾牌尾部上产生力。 因此,盾牌尾部上的力由内盾牌表面上的反作用力组成,从线段和由于线刷变形的力和施加的油脂压力。 为了计算力,假定以下:
1该段被视为刚体;
2盾牌尾部被认为是悬臂梁,其固定支撑在如图4所示的支撑梁的端部;
3由于钢丝刷变形引起的力与钢丝刷的变形具有线性关系,并且有图5所示的盾构件上的压力分布表示
图5. 由于作用在盾尾上的力
对于的反应力
如果盾接触到元件第i段,则可以获得 ,的力矢量
其中为圆周方向上元件的宽度; CT为刀片扭矩,带有正号,用于逆时针旋转CF(从护罩尾部观察),标志(CT)=1,用于CT0,标志(CT)=-1,用于CT0,标志(CT)=0,用于CT=0.
每单位宽度的第i个元件上的反作用力F计算为
其中
其中为作用点的尾部间隙;为每单位宽度盾牌尾部的弯曲刚度;为从固定支架到作用点的臂长,如图4所示。为段末端尾部间隙; 为尾端间隙; 为盾板尾部内硬化灌浆材料的厚度。计算和的程序在附录II中描述。
,作用点的位置矢量定义为
其中为盾牌尾部的内半径; 是从起点到梁的端部的长度。
对于的反应力
由作用在第i个元件上可以获得
其中为尾部元件的面积。 钢丝刷的变形导致尾部第i个元件处的油脂压力,而作用在内部盾牌表面上的压力可以从其中钢丝刷变形在第i个元件处的压力表示,为钢丝刷的弹簧常数; 为钢丝刷的原始高度; 为润滑各排金属丝刷之间施加的润滑脂压力; 为尾部间隙。 的计算程序在附录II中描述。
图6. 作用在刀面上的力(粘土地面)
,作用点的位置矢量表示
其中是从起点到尾端的长度; 并且是在r轴方向上从尾端到的作用位置的距离。
千斤顶推力
千斤顶推力在r轴方向上作用在安装千斤顶的平面上。还考虑了在顶板和分段之间的界面上的摩擦。 因此,可以从中获得由第i个插孔和其位置矢量引起的力矢量。
其中是液压千斤顶的横截面积; 是第i个插孔的状态(=1为有效插孔,=0为无效插孔) 为施加的液压; 是千斤顶在r轴的半径; 是千斤顶零行程时的长度; 是第i个插孔的行程。
面力
面上的力可以分为三个部分:由于作用在刀面的前后的接地压力而产生的力,由于作用在刀面的周边上的接地压力而产生的力,以及由于腔室的重量产生的,如图6所示。
作用在刀面前面和后面的力
垂直于刀具面的压力平衡产生以下条件:
粘土地面
沙土地面
其中为总土压力,为有效土压力; 为刀面的液压; 为作用于刀面的净压力; 为表面处的污物压力。
这里,注意下面的方程是用于粘土地面的。在砂质地面的情况下,用代替,并将添加到正常的土压力,用土压力和水压力一起计算粘土质地面,但在沙地中分别计算。 为了对进行建模,假定以下:
- 与初始正常接地压力成比例。
- 根据以往的研究,抗穿透性切削阻力取决于切削深度在等式 (13) (例如,Teale 1965; Kurihara 1988; Matsumoto et al.1989; PWRI 1992)或穿透角在等式(14) (Hata 1987).中所表示
其中是盾牌的前进速度; f是刀面的旋转速度; p是刀头的路径数; r为刀面上计算点的半径。 因为p和r对于机器来说是恒定的,/是/的函数。
- 刀面上的土压力分布的状态可能由于诸如地面在局部崩溃的原因而改变。因此,可以从中获得
其中F(p,q)是由于土压力状态的函数;a,b为常数。 公式(15)中的第二项是函数/fr的一阶近似。
为了计算作用在刀面前后的力,刀面是在径向和圆周方向上分成有限数量的小元件。作用在刀面上的第i个元素处的力矢量可以被定义为
其中
其中是第ij个元素在刀面上的面积; 是由于泥浆压力在刀面两侧的动摩擦形成的;是刀面的开口率; 可以通过将 ,代入等式 (12 ); 并从中找到 ,来自
其中是腔室顶部处的压力; 是腔室内污泥的单位重量; 是从腔室顶部垂直测量的第ij个元件的深度。 另外等式(15)中的 可以从挖掘步骤k-1和k之间的距离除以时间间隔获得,也就是
其中为的位置向量,可写为
其中是刀面上的第ij个元素的半径; 是从的原点到刀面中心的距离。
图7 盾周围的土压力状态
作用于刀面周边的力
假定作用在切削刃上的正常土压力作为初始正常土压:
由于在第j段元件上引起的力矢量及其位置矢量被定义为
其中是切削刃上第j个元件的面积; 为刀面的半径。
由腔室内的污物重量引起的力
污物在腔室中的重量作用在盾构件上的污物质心处。 由引起的力矢量及其位置矢量可以由下表示
其中是从的原点到腔室质心的距离。
作用在盾周边的力
挖掘过程中盾构件的蛇状运动如图7所示。 当开放面处的地面朝向盾件周边变形时,发生有效接地压力。 另一方面,当盾件外周的一些部
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137840],资料为PDF文档或Word文档,PDF文档可免费转换为Word

