
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
基于高密度机载激光点云和高分辨率图像的土地覆盖分类
M.Z.A.Rahman,W.H.W Kadir,A.W.Rasib,A.Ariffin,K.A.Razak
1、Tropical研究小组,地理信息部,地球信息科学学院和房地产专业,马来西亚理工大学,81310,Johor Baharu,Johor,马来西亚。
2、UTM Razak工程先进科技学校,UTM吉隆坡,等级7,Razak塔,Jalan Semarak,54100吉隆坡,马来西亚。
摘要
本文基于高密度机载激光雷达数据和多光谱图像实现土地覆盖分类。研究区域位于荷兰的Duursche Waarden滩区。FLI-MAP 400 激光雷达系统的采点密度是每平米有50到100个点。除了高度和强度信息,该激光雷达系统还提供了光谱信息(红色波段、绿色波段和蓝色波段),并且高度、强度、红色波段、绿色波段和蓝色波段信息具有多种特性。土地覆盖分类的过程采用支持向量机(SVM)和最大似然(ML)分类法。每个分类器在三种不同的数据集上使用:1)FLI-MAP 400生成的多光谱图像,2)激光雷达衍生特征,3)多光谱图像和激光雷达衍生特征的组合。实验结果表明:SVM分类方法的分类效果比ML方法更好。基于激光雷达衍生特征和多光谱图像融合的技术进行土地覆盖分类产生的结果比仅基于其中一个数据集分类效果好。
关键词:土地覆盖分类,机载激光雷达,支持向量机
- 介绍
机载激光雷达数据为土地表面提供了补充信息,比如强度和海拔信息。由于三维(3D)点云的性质,因而在分类过程中,机载激光雷达数据能够提供非常有用的特征进行分类。在给定的空间分辨率下,点云在不同的统计分析方法下得到的统计特征与土地覆盖分类的垂直结构有关。之前大量实验结合光谱,海拔和强度信息进行了土地覆盖分类。Antonarakis等人仅利用机载雷达激光数据来进行森林分类和其他土地覆盖分类。他们生成了若干栅格地图:1)植被高度模型,2)平均强度模型,3)强度差模型,4)概略分布的偏度,5)峰度模型。采用基于规则技术进行土地覆盖分类,其分类精度超过94%。Straatsma和Baptist结合由压缩空气光谱成像仪(CASI)收集的光谱数据和从激光雷达数据衍生特征的归一化数字模型(nDCM)进行分类,其总体分类精度为81%。Brennan和Webster使用激光雷达数据衍生特征(平均强度、标准化的高度、数字表面模型和多次LiDAR回波)进行分类,发现机载激光雷达数据有能力确定相当数量的类别,总体精度达到98%。
Charaniya等人使用LiDAR数据的高程和强度信息来分类,地物类别为:房顶、草地、树木和道路,他们的分类精度到达84%。另一项研究,Bartels和Wei使用首次和末次回波的LiDAR高程信息、强度信息和近红外图像进行土地覆盖分类,他们研究的总体精度达到83%。
结果表明:机载LiDAR数据可以在分类中可以单独使用,也可以结合多光谱数据使用。但是,正如上述研究表明:不同的平台被用来获得机载激光雷达数据和多光谱数据。
- 数据和研究区的描述
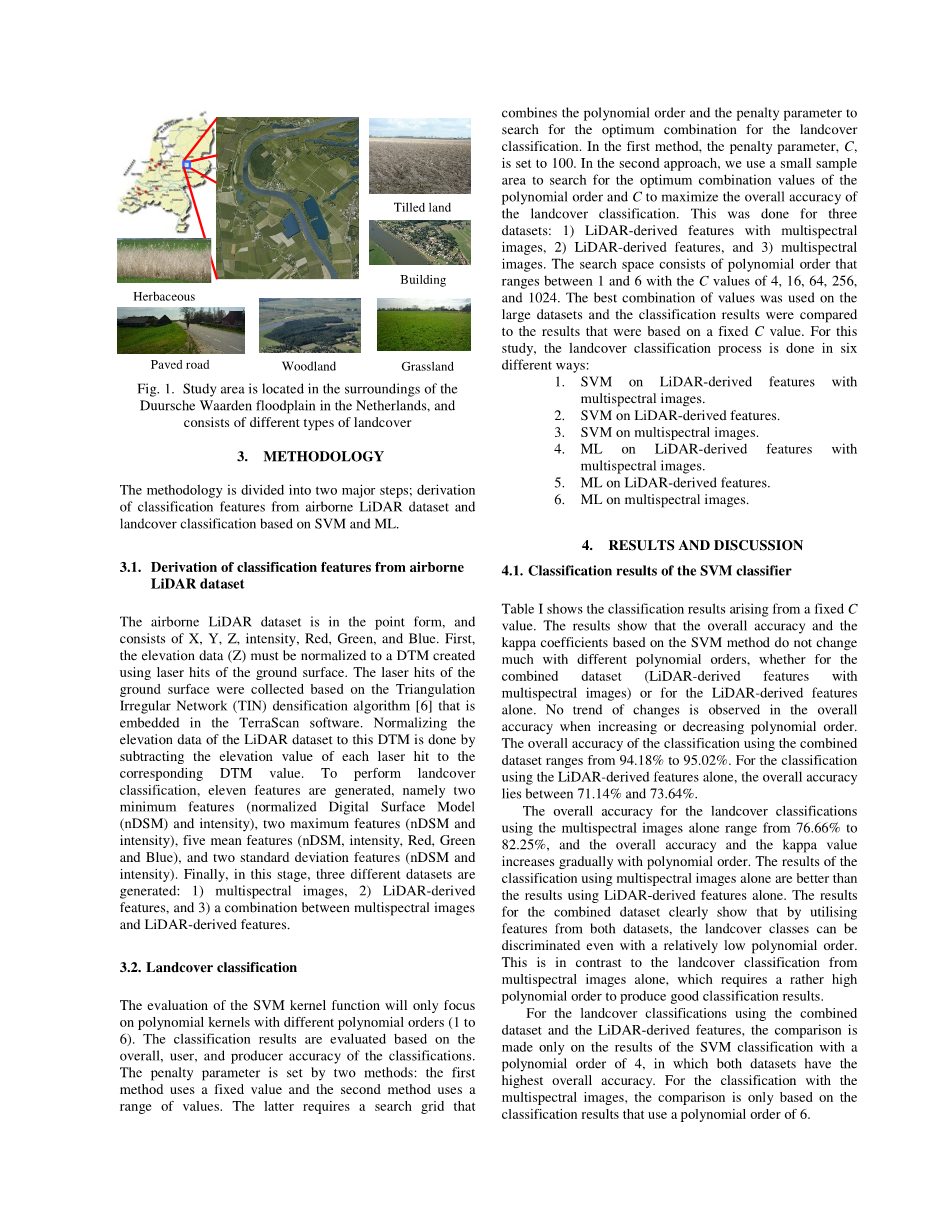
研究区域位于荷兰的Duursche Waarden滩周围。这个地区是平坦的,除了沿边IJssel河路基外。它含有几类地物类别:住宅和娱乐建筑、草地、树木、裸土或耕种土地、草本植物、路面和湖泊。机载激光雷达数据是在2007年3月28号由FLI-MAP 400系统获取得到。TLI-MAP 400是一种直升机式激光雷达系统,能够准确、详细地获取高程信息。线性扫描成像系统是负责记录RGB激光的每个回波信息。FLI-MAP 400系统获取的数据绝对精度大约是:垂直方向为5cm,竖直方向为8cm。该系统可以扫描与斜方向或最低点方向的角度(包括7度向后和7度向前)。因为FLI-MAP 400激光雷达系统规格,可知该激光的回波点在一个特定地区的数量是稠密的。
图1:研究区域位于荷兰的Duursche Waarden滩周围,包括不同土地覆盖类型。
- 方法
该论文分为两个主要部分:从机载LiDAR数据集中推导分类特征和基于SVM和ML方法的土地覆盖分类。
3.1从机载LiDAR数据集推导分类特征
机载激光雷达数据集是以点的形式表示,并且由X,Y,Z,强度信息,红色波段,绿色波段和蓝色波段信息组成。首先,高程数据(Z)必须规范到由到达地面的激光创建的DTM中,到达地面的激光点是基于不规则三角网(TIN)加密算法收集的,该算法被嵌入到TerraScan软件中。激光雷达数据集的高程数据标准化就是:此时的DTM值减去每个激光打到相对应的DTM值。进行土地覆盖分类,使用十一种特征:两个最小特征(归一化数字表面模型(nDSM)和强度信息),两个最大特征(nDSM和强度信息),五个平均特征(nDSM,强度信息,红色波段,绿色波段,蓝色波段信息),和两个标准偏差特征(nDSM和强度信息)。最后,在这个阶段,生成三种不同数据集:1)多光谱图像,2)LiDAR数据衍生特征,3)合并多光谱图像和LiDAR数据衍生特征。
3.2土地覆盖分类
影响支持向量机的分类精度重点在于不同的多项式阶核函数。基于总体、用户和生产者精度对分类结果进行评价。其中惩罚系数有两种方法设定:第一种方法使用固定值,第二种方法使用值的范围。后者需要进行搜索,它为了土地覆盖分类进行最佳组合,该组合结合了最佳多项式阶次和惩罚系数。在第一种方法中,惩罚系数C是设置为100。在第二种方法中,我们使用一个小样本区域来搜索最优多项式阶次和惩罚系数C进行最大化土地覆盖分类的总体精度。该方法基于三个数据集:1)多光谱图像和LiDAR数据衍生特征的合并,2)LiDAR数据衍生特征,3)多光谱图像。搜索空间是由1到6范围的多项式阶次和C(惩罚系数,值为:4,16,64,256,1024)组成的。最好的组合值是基于大数据集和一个固定C值(惩罚系数)进行分类的结果。为了这一研究,土地覆盖分类过程是在六种不同的方式完成:
- 基于多光谱图像和LiDAR数据衍生特征合并数据,采用SVM分类法进行土地覆盖分类;
- 基于LiDAR数据衍生特征,采用SVM分类法进行土地覆盖分类;
- 基于多光谱图像,采用SVM分类法进行地物覆盖分类;
- 基于多光谱图像和LiDAR数据衍生特征合并数据,采用ML分类法进行土地覆盖分类;
- 基于LiDAR数据衍生特征,采用ML分类法进行土地覆盖分类;
- 基于多光谱图像,采用ML分类法进行土地覆盖分类;
- 结果和分析
4.1 SVM分类器的分类结果
表1显示的是由一个固定的惩罚系数C值产生的分类结果。由表1可知:基于SVM分类方法产生的总体精度和kappa系数不会随着不同的多项式改变,无论是采用合并数据(多光谱图像和LiDAR数据衍生特征的合并)又或者单独LiDAR数据衍生特征进行分类,当多项式阶次在增加或者减少时,总体精度没有发生变化。使用合并数据集的总体分类精度的范围从94.18%到95.02%。仅使用LiDAR数据衍生特征进行分类,总体分类精度位于:71.14% 与73.64%之间。
表1:基于合并数据集(多光谱图像和LiDAR数据衍生特征的合并)、LiDAR数据衍生特征以及多光谱图像的分类精度对比表
根据表1可发现:仅使用多光谱图像进行分类,总体分类精度范围从76.66%到82.25%,总体精度和kappa系数随着多项式的阶次变化逐渐增加。仅使用多光谱图像进行分类的结果优于仅使用LiDAR数据衍生特征进行分类的结果。基于合并数据集(多光谱图像和LiDAR数据衍生特征的合并)的分类结果清楚地表明:利用两个数据集的特征,甚至是用相对较低的多项式阶次,土地覆盖的类别也可以区分开。这与仅使用多光谱图像来进行土地覆盖分类相对比,它需要一个相当高的多项式,才能获得较好的分类结果。基于合并数据集(多光谱图像和LiDAR数据衍生特征的合并)进行土地覆盖分类,该比较是基于仅使用多项式阶次为4来进行SVM分类的结果,此时总体分类精度最高。同时基于多光谱图像的分类,该比较是仅基于使用多项式阶次为6来进行SVM分类。
基于合并数据集(多光谱图像和LiDAR派生出来的特征合并)进行土地覆盖分类,该方法能为所有土地覆盖类别提供准确的结果(见表2和图2)。根绝表2中的用户和生产者精度,LiDAR数据衍生特征足以从其他土地覆盖类别中区分建筑物和森林区域。使用LiDAR数据衍生特征和其它来自多光谱图像的信息来进行草本植物的分类略有改善。从另一方面来说,多光谱图像在草地、铺平道路和耕种土地的分类有着重要的作用(见表2)。这些土地覆盖类别(铺平道路、草地和耕种土地)在LiDAR数据衍生特征中有相似的属性,但是在多光谱图像中属性不同。一般来说,仅使用多光谱图像进行土地覆盖分类,能为草地和草本植物分类提供良好的结果。但是,LiDAR数据衍生特征可以提高分类精度,尤其在建筑物、耕种土地、铺好的道路和森林或乔木。
表2:基于合并数据集(多光谱图像和LiDAR数据衍生特征的合并)、仅基于多光谱图像和仅基于LiDAR数据衍生特征下SVM分类的误差矩阵
图2:基于合并数据集(多光谱图像和LiDAR数据衍生特征的合并),采用SVM方法的分类结果
对于合并数据集(多光谱图像和LiDAR数据衍生特征的合并),使用惩罚系数C和多项式阶次之间的最佳组合值来进行分类,总体分类精度和kappa系数达到95.01%和0.94,此时采用1024的惩罚系数C值和多项式阶次为5的组合得到这样的结果。采用固定的惩罚系数C值和多项式阶次为4进行分类,结果没有显著性的差异。相比之下,仅基于LiDAR数据衍生特征,使用惩罚系数C和多项式阶次的最好组合来进行土地覆盖分类,总体分类精度达到68.2%,相应的kappa系数为0.61,该结果是基于惩罚系数C为4和多项式阶次为1获得的分类结果。用固定的惩罚系数C(C=100)和多项式阶次为4组合进行分类的结果是不精确的。
在惩罚系数C和多项式阶次最好的组合下,仅基于多光谱图像进行分类,总体精度和kappa值分别为80.51%和0.76,其中惩罚系数C和多项式阶次分别被设置为1024和3。与一个固定的惩罚系数C值和多项式阶次为6的分类结果相比,总体精度和kappa系数略有降低。
4.2 ML分类方法的分类结果
基于合并数据集(多光谱图像和LiDAR数据衍生特征的合并)进行土地覆盖分类,得到的总体分类精度是87.99%。仅采用LiDAR数据衍生特征或者仅采用多光谱图像进行分类,总体分类精度分别是68.13%和75.34%。通常,单独使用LiDAR数据衍生特征的分类结果和在SVM分类器的分类结果相似,因而多光谱图像在其中发挥着重要作用,提高了分类结果。再者,LIDAR数据衍生特征在分类森林,乔木和草本植物有很好的精度(见表3)。在多光谱图像的辅助下,这些土地覆盖分类的分类精度只是略有提高。然而,在基于多光谱图像分类下,建筑物的分类精度稍微降低,因为此类(建筑物)与草原、道路、森林和乔木容易被混淆。此外,这些结果表明,多光谱图像需要提高草地、耕地和道路的分类结果。
表3:基于合并数据集(多光谱图像和LiDAR数据衍生特征的合并)、仅基于多光谱图像和仅基于LiDAR数据衍生特征下ML分类的误差矩阵
仅基于多光谱图像的土地覆盖分类,建筑物分类的生产者精度不高,此类(建筑物)往往被错误地归类到道路、森林或者乔木以及干净的柏油路,这些地物在某些情况下,与建筑物屋顶有类似的颜色。肮脏的路往往是有颜色的,类似于耕种的土地、森林或乔木。草本植物是最常见的被错误地分类为耕地的土地、森林或乔木,因为在冬天,草本植物也有类似于耕种的土地、森林或乔木的颜色。然而,草地可以利用多光谱图像进行分类,绿色草地的颜色可以很容易地区别于其他土地覆盖分类。这清楚地表明:采用ML分类方法,基于LiDAR数据衍生特征进行分类,需要改进分类结果,特别是建筑物、道路、草本植物、森林或者乔木地物。
4.3 SVM和ML的比较
在本节中,我们只比较基于一个固定的惩罚系数C值下的SVM分类和ML分类。一般来说,仅基于LiDAR数据衍生特征进行的土地覆盖分类, SVM分类和ML分类都表明需要多光谱图像来提高土地覆盖分类,特别是耕种的土地、草原和铺平的道路。这些土地覆盖类别(耕种的土地、草原和铺平的道路)有相似的高度信息(最大和最小nDSM),强度信息和垂直结构(nDSM的标准偏差)。仅基于多光谱图像的土地覆盖分类,SVM分类方法的结果表明:LiDAR数据衍生特征能提供更好的分类结果,尤其对于耕种的土地、建筑物、道路、森林或者乔木。同样,使用ML分类结果表明:LiDAR数据衍生特征提高了分类精度,尤其对于耕种的土地、建筑物、道路和草本植物。
与合并数据集的分类结果相比,仅基于多光谱图像采用SVM来进行土地覆盖,其分类精度降低,特别是建筑物、铺好的道路、森林或乔木。ML分类方法也降低了分类精度,特别是建筑物、道路、草本植物或乔木。
采用SVM分类方法的所有土地覆盖类别的总体精度都优于ML分类方法。此外,个人用户和生产者精度表明:在大多数情况下,在分类每个类
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[25664],资料为PDF文档或Word文档,PDF文档可免费转换为Word

