英语原文共 18 页,剩余内容已隐藏,支付完成后下载完整资料
Park et al. Robomech J (2015) 2:14
DOI 10.1186/s40648-015-0035-x
RESEARCH ARTICLE Open Access
The mechanical structure of mobile
module for new self-configurable intelligent
environment
JongSeung Park1*, Toshitake Nunogaki2 and Joo‑Ho Lee3
Abstract
The intelligent space (iSpace) is a representative extensive environmental system. In the iSpace, various Distributed Intelligent Networked Devices (DINDs) are installed for the provision of useful services. Through the input device of the DIND, the iSpace recognizes a spatial situation and userrsquo;s demands and then determines the appropriate service based on the recognized information. Physical and nonphysical services are provided by the agent robots and the output devices of the DINDs. The system is designed to increase the convenience of the userrsquo;s life. However, the con‑ ventional iSpace has an unsolved problem related to a DINDrsquo;s physical location, because most DINDs are fixed to the walls and ceiling, and this constrains a DINDrsquo;s usable range. To solve this problem, a self‑configurable iSpace, referred to as reconfigurable intelligent space (R iSpace), and a mobile module (MoMo) for the R iSpace are proposed
in this paper. A MoMo is a type of wall climbing robot, and the DIND is mounted on the MoMo. The DINDrsquo;s spatial constraint problem can be solved by rearrangement of the MoMo. MoMo has several necessary conditions that must be satisfied, and we developed three prototypes that fulfilled these requirements. This paper describes the required conditions and the mechanical structures of the prototypes of MoMo. The prototype of MoMos can move within modified walls and ceilings. Experiments to verify the mobility of the latest prototype of MoMo and effectiveness of the R iSpace were performed. The latest prototype of MoMo is found to have a mechanical structure for the imple‑ mentation of the R iSpace that is superior to the previous versions, and the R iSpace is found to effectively solve the DINDrsquo;s spatial constraint problem.
Keywords: Intelligent space, Intelligent environment, Reconfigurable system, Climbing robot
Background
Intelligent environments (IEs) are extensive environmen- tal systems that provide information and services to their users. They are known by various names such as smart room, ubiquitous computing environment, and intel- ligent space (iSpace) [1–4]. The interaction between an IE and a user is realized by networked sensors that are installed in the walls and ceilings of a building. In the case of the iSpace, these are Distributed Intelligent Networked Devices (DINDs). Spatial situations or userrsquo;s demands are identified by the recognition application of the DINDs
*Correspondence: gr0119hk@ed.ritsumei.ac.jp
1 Graduate School of Science and Engineering, Ritsumeikan University, 1‑1‑1, NojiHigashi, Kusatsu 525‑8577, Japan
Full list of author information is available at the end of the article
through input devices such as a camera and a micro- phone. The DINDs in the iSpace integrate the obtained information from the DINDs with the recognition appli- cation and then decide the appropriate service according to the current situation. This service is provided by agent robots and DINDs through output devices such as a pro- jector and a speaker. Physical agent robots provide the physical services, and the DINDs handle the information provision services.
The disadvantage of conventional IEs
Many studies have been focused on the improvement of iSpacersquo;s performance [5–7]. The performance of the iSpace is evaluated by the suitability of the provided service and the completeness of the service fulfillment. High-quality recognition results assist in deciding on the
copy; 2015 Park et al. This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
proper service according to the situation; moreover, such results can be achieved by the high-performance recog- nition application or advanced input devices. However, even though the iSpace uses the high-performance rec- ognition application with advanced input devices, it does not guarantee that the recognition result will have a con- sistent high accuracy because all devices have a spatial constraint issue. It is quite obvious that the recognition results of a target in the blind spot of a device are poor. Although the target may be located in the devicersquo;s field of vision, the output of the recognition application may not always be of the highest standard because the best results can only be achieved when the target is located in the devicersquo;s optimal position. This is not only a problem in directional devices but also omnidirectional devices, which also have a usable area that is restricted by a dis- tance between the device and a target. The amounts and quality of information that are achieved by the device decline according to increments of the distance. This
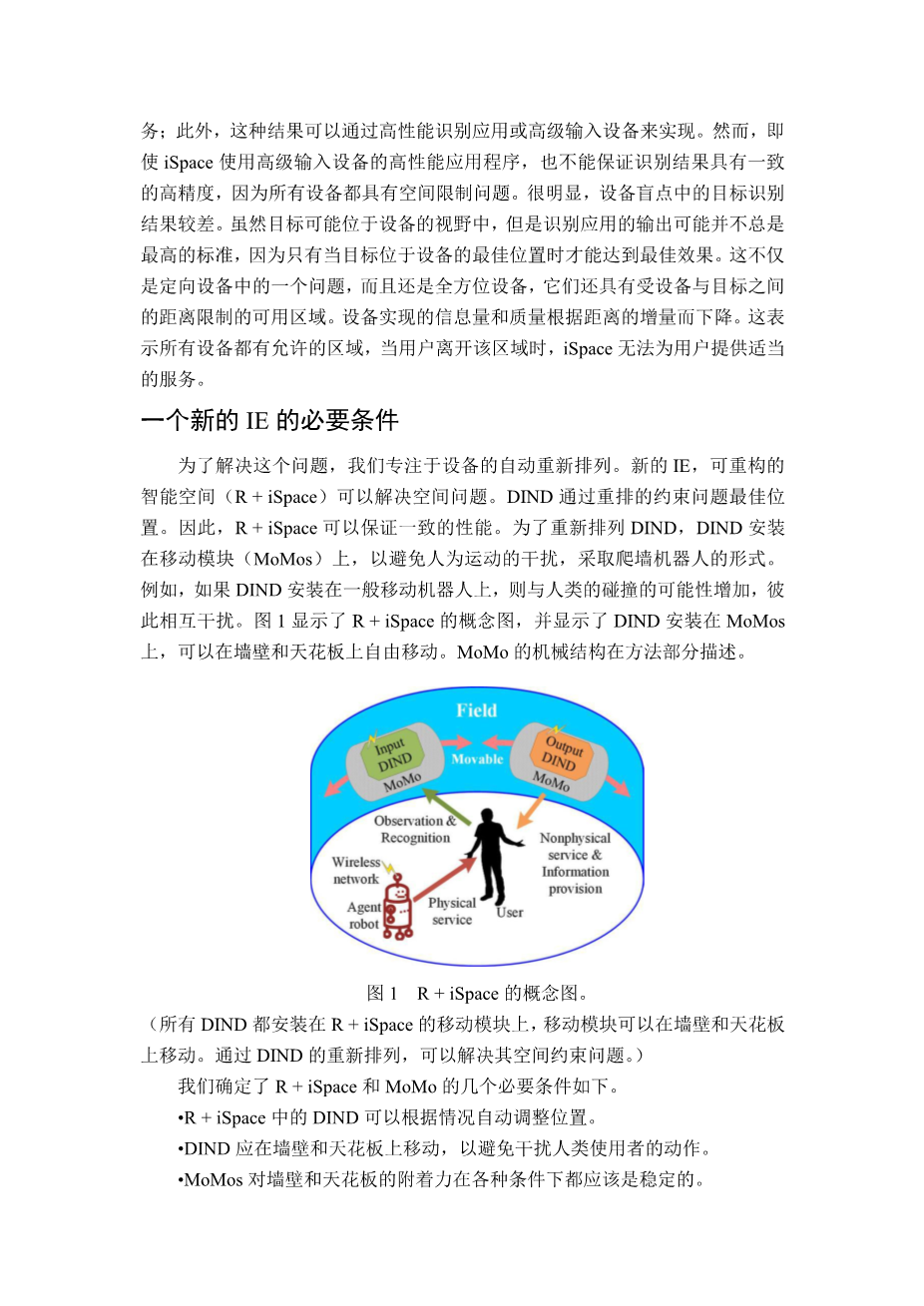
Fig. 1 Conceptual diagram of the R iSpace. All DINDs are mounted on the mobile modules in the R iSpace, and the mobile modules can move on the walls and ceilings. Through the rearrangement of t
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138150],资料为PDF文档或Word文档,PDF文档可免费转换为Word

