
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
- 介绍
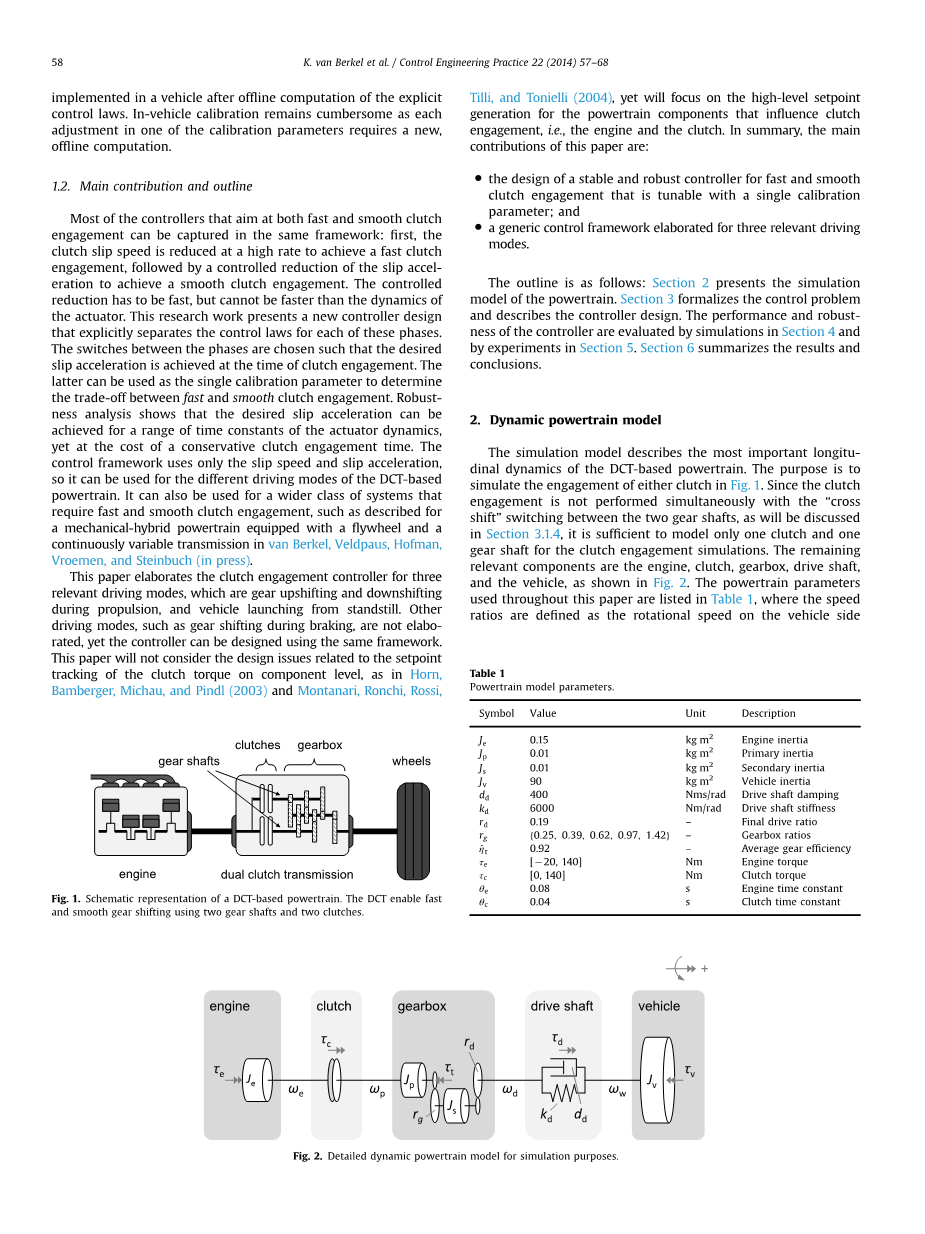
自动变速器在乘用车中变得越来越受欢迎,用于自动齿轮选择和换档(Wheals等,2007)。有几种类型的自动变速器,如经典的自动变速箱,低成本自动手动变速器,无级变速器和双离合器变速箱(DCT)。有时称为直接变速箱的DCT使用两个齿轮轴和离合器,如图1所示。可以预先准备下一次换档的惰轮轴,因此当需要实际变速时,两个离合器可以在齿轮轴之间快速切换(Zhang,Chen,Zhang,Jiang,&Tobler,2005)。这给了DCT相对于其他自动传动技术的一些优点:它克服了换档期间扭矩中断的不适问题,而不会牺牲大量的传动效率。此外,通过使用快速升档策略,可以提高燃油效率,而不会牺牲大部分的性能(Ngo,Hofman,Steinbuch和Serrarens,2012)。当驾驶员要求更多的发动机功率时,DCT能够对低档进行快速和舒适的换档。
1.1控制问题制定
DCT的性能很大程度上取决于离合器接合的质量:驾驶员期望动力传动系的快速响应,而不会感觉到转矩中断和由发动机惯性引起的振荡。离合器接合控制器的任务是实现快速和平稳的离合器接合,受制动器动力学和传感器测量的不确定性.此外,由于其在竞争激烈的汽车工业中的相关性,控制器仅限于使用标准速度传感器来保持成本低廉,并且使用有限的计算和存储资源来实现其在实时硬件中。 为了增强车载校准,设计必须是透明的,以了解每个校准参数的影响,而数字校准参数需要尽可能小(Christen&Busch,2012)。
在文献中广泛研究了用于自动变速器的离合器接合控制器的设计,得到了几种解决方案。去耦(线性)控制器显示出有希望的仿真和实验结果,易于实现
(1996),Pettersson和Nielsen(2000),Fredriksson和Egardt(2000),Garofalo,Glielmo,Ianelli和Vasca(2001),Serrarens,Dassen和Steinbuch(2004)和Glielmo,Iannelli, Vacca和Vasca(2006)。然而,这些设计中的许多设计忽略了相关的致动器动态或仅考虑其频域特性,从而忽略了由状态的初始条件引起的相关瞬态效应。在Tanaka和Wada(1995)和Kulkarni,Shim中提出的脉冲和模糊逻辑控制器,Zhang(2007)基于多维控制图,需要对多个参数进行特殊校准。最后,Bemporad,Borrelli,Glielmo和Vasca(2001),van der Heijden,Serrarens,Camlibel等所描述的具有混合成本函数的最优模型预测控制器,和Nijmeijer(2007)和Dolcini和Beacute;chartdeWit(2010),可以在离线计算明确的控制法之后在车辆中实现。车辆校准仍然很麻烦,因为其中一个校准参数中的每个调整都需要新的离线计算。
1.2主要贡献和大纲
针对快速和平稳的离合器接合的大多数控制器可以在相同的框架中捕获:首先,以高速率降低离合器滑差速度以实现快速离合器接合,随后将滑动加速度控制减小到实现平稳的离合器接合。控制的减速必须快速,但不能比执行器的动力学更快。本研究工作提出了一种新的控制器设计,明确地分离了每个阶段的控制规律。选择相之间的开关使得在离合器接合时实现期望的滑移加速度。后者可以用作单个校准参数,以确定快速和平稳离合器接合之间的权衡。鲁棒性分析表明,所需的滑移加速度可以在致动器动力学的一定范围的时间常数上达到,但以保守的离合器参与时间为代价。控制框架仅使用滑差速度和滑移加速度,因此可用于基于DCT的动力系的不同驱动模式。它还可以用于需要快速和平稳的离合器接合的更广泛的系统,例如在van Berkel,Veldpaus,Hofman,Vroemen和Steinbuch中配备有飞轮和无级变速器的机械混合动力传动系。本文详细阐述了三种相关驾驶模式的离合器接合控制器,即驱动时的档位升档和降档,以及从停机引起的车辆。 其他驾驶模式,如制动时的换档,还没有详细说明,但控制器可以使用相同的框架进行设计。本文将不考虑与零件级别的离合器扭矩的设定值跟踪相关的设计问题,如Horn,Bamberger,Michau和Pindl(2003)以及Montanari,Ronchi,Rossi,Tilli和Tonielli(2004), 将专注于影响离合器接合的动力总成部件的高水平设定值产生,即发动机和离合器。 总之,本文的主要贡献是:
·设计稳定可靠的控制器,用于快速和平稳的离合器接合,可通过单个校准参数进行调节;
·制定了三种相关驾驶模式的通用控制框架。
大纲如下:第2节介绍动力总成的仿真模型。第3节规范了控制问题,并描述了控制器设计。控制器的性能和鲁棒性通过第4节中的模拟和第5节的实验进行评估。第6节总结了结果和结论。
图1
图2
2.动态动力总成模型
仿真模型描述了基于DCT的动力系的最重要的纵向动力学。 目的是模拟图1中任一个离合器的啮合。 由于离合器接合不与“十字”同时进行,如第3.1.4节所述,在两个齿轮轴之间进行换档切换,只需对一个离合器和一个齿轮轴进行模拟即可进行离合器接合模拟。 剩余的相关部件是发动机,离合器,变速箱,驱动轴和车辆,如图1所示。 本文中使用的动力总成参数列于表1中,其中速比被定义为车辆侧的转速除以发动机侧的转速。 每个组件模型在续集中有更详细的描述。
2.1发动机
汽油内燃机通过复杂的化学和机械过程产生机械动力。 发动机控制单元(ECU)控制和监视这些过程,以控制发动机转矩,其可以取 中的任何值; 扭矩作为节气门位置,发动机转速,温度和空气/燃料混合物的函数间接控制,这可能导致由于建模不确定性造成的偏移。 对于四冲程燃烧循环,致动延迟至少两个曲轴转数(Serrarens,2001),而扭矩速率被限制为减少污染物排放(Nuuml;esch,Wang,Voser,&Guzzella,2012)。 平均值动力学可以用具有固定时间常数的一阶线性模型近似(Guzzella&Onder,2010; van der Heijden等,2007,由
其中表示由重音表示的请求离合器扭矩。 高阶动力学和许多变量的依赖关系在theta;e的不确定性中被考虑。 在模拟中,在扭矩偏移和时间常数中不考虑建模不确定性,但是控制器对这些建模不确定性的鲁棒性将在第3.8节中的设计进行讨论。
所要求的发动机扭矩通常等于由基于加速踏板位置和制造商特定查找表的由杆表示的ECU确定的额定发动机扭矩。 DCT可以请求ECU从其标称设定点暂时减小转矩请求,例如在升档期间使发动机减速,但是出于安全原因可能不要求转矩增加,因此
尽管有这样的限制,可以执行所有的驱动模式,如3.1节所述。 发动机转速动力学由模型化
其中是发动机转速,是发动机惯量,是通过离合器传递的扭矩。
2.2离合器
考虑的离合器是一个多板系统,浸在变速器油中并集成在DCT中。 这种湿摩擦离合器类型通常用于其紧凑的设计和在离合器接合期间的良好的可控性特性。 当滑动时,离合器板上的压力可由液压致动器操纵,以控制传递的离合器扭矩(),该扭矩可以在内取任何值;扭矩从离合器的高速侧传递到低速侧,因此,符号()=符号(),其中表示齿轮箱的主速度。
传递的离合器扭矩由相对简单的前馈控制器控制,其使用摩擦表面的摩擦特性作为变速箱油温度和滑移速度的(静态)功能。 由于摩擦面和变速箱油的磨损,实际的摩擦特性会(缓慢地)在时间上发生变化,这可能导致离合器扭矩的偏移。 流体膜和阀中的流体动力学给出了小的致动延迟,这取决于温度,滑移速度和油压。 主导动力学可以通过具有固定时间常数的一阶线性模型近似(Gao,Chen,Sanada,&Hu,2011; van der Heijden等,2007),由
其中表示所请求的离合器扭矩。 在的不确定性中考虑了较高阶动力学以及对温度,滑移速度和油压的依赖性。 除了这些动力学之外,当压力室未预先填充时,可以期望实质上的延迟(eth;0.1s),这与车辆停止时的扭矩响应相关,但是在离合器的临界离合器接合阶段期间 已经传递扭矩。 在模拟中,在扭矩偏移和时间常数中不考虑建模不确定性,但是控制器对这些建模不确定性的鲁棒性将在第3.8节中的设计进行讨论。
2.3变速箱
变速箱包括一个五速齿轮组,一个Drive-NeutralReverse(DNR)组合以及一个带有最终传动齿轮的差速器。 对于传输模型,DNR被忽略,因为只有驱动模式是感兴趣的。 齿轮组的速比取决于所选齿轮g,并在离合器保持恒定订。最终驱动齿轮(下标“d”)的固定速比由表示,因此.速度动力学被建模为集总功能主轴上的传动惯性和副轴上的集总传递惯性
其中是驱动轴扭矩。 由于液压泵的传动损失和轴承中的摩擦力以损失转矩为单位,损失转矩由经验模型描述为转速,扭矩和传动比的函数。
2.4传动轴
将最终传动装置与驱动轮连接的驱动轴相对较长而细长。 假设以直线行驶,它们可以用线性弹簧阻尼器系统建模,刚度和阻尼导致Slicker和Loh(1996)和Dolcini和Beacute;chartdeWit(2010)
其中是轮轴的转速。
2.5车辆
由于这项工作主要集中于离合器接合,所以车轮滑移被忽略,因此车轮质量和车轮惯性可以集中在轮轴上的等效惯量。 动力学由模型化
其中表示外部负载,由于滚动阻力,空气阻力和高度变化。
3.控制器设计
动力总成控制器由两层组成:监控控制器选择最合适的驾驶模式,而特定驾驶模式控制器执行专门的控制任务,如离合器啮合。 为了简化总体控制器设计,希望具有可用于多种驾驶模式的通用离合器接合控制器。 在续篇中,更详细地说明了三种相关的驾驶模式,其中明确地设计了离合器接合控制器。 一是确定和正式确定控制目标
引入控制器设计模型,得出控制规律。 因此,分析了不确定的致动器动态对控制性能的影响。
3.1驾驶模式
考虑的驱动模式是
升压换档:当发动机连续传递到车轮(phi;= 1)时,DCT向上移动一档。
降档功能:当发动机连续传输到车轮(phi;= 2)时,DCT向下移动一档。
车辆发射:车辆从静止加速到离合器接合(phi;= 3)。
其他相关的驾驶模式是在制动情况下,当发动机拖曳转矩(部分地)使车辆减速时升档和降档。
图3,4和5示出了最相关的动力系组件的速度和转矩。 对于每个驾驶模式,识别出三个类似的离合器接合阶段,而功率升档和动力降档具有额外的交叉相位相位。
3.1.1升档功率
要求升档功率通过降低发动机转速提高燃油效率。 驱动轴扭矩由于较高的传动比而降低,这可能由驾驶员预期,或通过进一步按压加速器踏板来补偿。 在电动升档开始之前,发动机与下档“L”表示的变速齿轮相连,即。无效齿轮轴由下标“H”表示的较高档位之后获得。
图1
图2
图3
功率升档开始于交叉换档,以将转矩传递从一个离合器改变到另一个离合器,而发动机功率可以从。连续传递到驱动轴。在交叉换档之后,离合器接合开始于减少 发动机扭矩以高速率(相位1)降低滑移速度,随后是滑差加速度(阶段2)和离合器闭合(阶段3)的受控减小。 离合器关闭后,发动机扭矩恢复到其标称值。在发动机扭矩减小的短时间内,驱动轴扭矩(部分)由发动机惯性传递。
3.1.2降档功率
要求降低功率,以提高发动机的转速和转矩。 驱动轴扭矩不会立即增加,因为发动机功率的一部分需要首先加速其惯性,而驾驶员会感觉到非常快的听觉响应,即增加发动机噪声频率,而不会经历任何扭矩中断。 在电源降档开始之前,发动机连接到较高档,而非活动齿轮轴连接到下齿轮。
功率降档由额定发动机扭矩(或加速踏板位置)突然增加触发。 由于交叉位移只能在时发生,首先通过将离合器转矩保持在低于发动机转矩的方式,以高速率(相位1)减小滑移速度。 因此,滑移加速度减小(阶段2),以获得执行交叉变换所需的受控过冲。 在十字移位之后,离合器立即关闭(阶段3)。
3.1.3车辆启动
车辆启动被要求加速车辆停止(或从非常低的车速)。 在车辆启动之前,发动机以节省空转的怠速运行速度,而在车辆发射期间,发射速度更需要更多的发动机功率,这可能是一个功能 的加速踏板位置。 在离合器接合之后,由于发动机惯性的加速度的变化,驱动轴转矩略微降低。
车辆发动是由于额定发动机扭矩突然增加而引起的,此后离合器扭矩必须保持相对较低,以便将发动机加速到其发射速度。同时,离合器扭矩必须逐渐增加以加速车辆, 司机马上会注意到动力总成响应。 达到发射速度后,离合器扭矩增加,以高速率(相位1)降低滑移速度,接着是滑移加速度(相位2)和离合器闭合( 阶段3)。
3.1.4交叉
在交叉换档期间,扭矩传递从“离开”齿轮轴转移到“即将到来的”齿轮轴,通过(线性地)减小离合离合器的传递扭矩同时增加即将到来的离合器的传递扭矩。 为了避免任何致动延迟,即将到来的离合器需要用预填充的离合器室来准备,而离合离合器的扭矩容量需要减小到传递的扭矩。 考虑到致动器动力学(即0.3s)的可行时间框架,同步交叉位移相对简单,特别是当使用相同的致动器时,导致逐渐变化的驱动轴转矩。 由于十字换档与任何离合器接合阶段不一致,所以在下面的离合器接合控制器的设计中不考虑这一点。
4.结论
执行仿真以评估所提出的控制器设计的性能和鲁棒性。 选择一组三个模拟来回
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138450],资料为PDF文档或Word文档,PDF文档可免费转换为Word

